
Nu kan du bidra till robotforskningen
NYHET
KTH-forskare jobbar för fullt med att se till att robotar ska kunna röra sig smärtfritt i våra hem. Ett viktigt steg i den riktning är forskningsprojektet Kinnect@Home där forskarna använder billig tv-spelsteknik från Microsoft för att samla in stora mängder information. Information som i sin tur leder till att robotarna kommer att bli allt bättre på både se vad som är vad i kök och vardagsrum. Var informationen som ska göra robotarna bättre kommer från? Ditt och mitt hem.
– Vår forskning går ut på att utveckla så kallade algoritmer för att få robotar att kunna verka i vanliga miljöer. Vi robotforskare konstruerar sådana miljöer i lab hela tiden, och klarar robotarna dessa miljöer inbillar vi oss att den är redo för världen. Problemet är bara att sådana här labmiljöer befinner sig ganska långt ifrån den verkliga världen, säger Patric Jensfelt, robotforskare vid KTH.

Han tillägger att ett vardagsrum kan se ut på väldigt många olika sätt, och är sällan fyllda med några få objekt och väggar tillverkade av papp som de är i forskarlabben. Dessutom vet de forskare som samlar in data också hur deras robotalgoritmer är skrivna, så det är lätt att medvetet eller omedveten samla in data utifrån dessa vilket gör att det inte blir ett fullvärdigt test av algoritmerna.
För att råda bot på dessa problem har forskningsprojektet Kinnect@home skapats. Det är ett så kallat crowdsourcing-projekt där alla som har tillgång till en dator med Windows och en Kinnectkamera från Microsoft kan delta med informationsinsamlandet. Det enda som krävs är att en mjukvara som KTH-forskaren Alper Aydemir och KTH-studenten Rasmus Göransson skapat installeras på datorn.

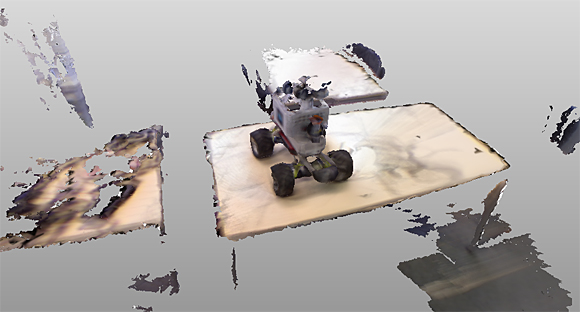
Användaren kan sedan scanna av omgivningen i sitt vardagsrum eller kök, och få en fräckt 3D-bild av hur rummet ser ut. Forskarna får å sin sida information som de kan använda som underlag till att skapa de algoritmer som behövs för att robotar bättre ska kunna se och interagera med omgivningen. Varje inscannad miljö (kök, vardagsrum och så vidare) blir till ytterligare en pusselbit som förbättrar robotarnas prestanda i sammanhanget.
– Idag kan robotar tämligen smärtfritt röra sig från punkt A till punkt B. De är väldigt bra på strukturerade uppgifter, som att snabbt montera ihop en bil. De är mindre bra på att gå till kylskåpet och hämta en öl. Robotar har problem med att känna igen olika objekts varierande skepnader och hantera det okända, säger Patric Jensfelt.
Det är här som Kinnect@Home gör skillnad. Genom att få en stor mängd information om till exempel hur olika kylskåp eller stolar kan se ut kan roboten sedan lära sig vad som är vad. Samt interagera med objekten ifråga.
– Det handlar alltså om att robotar ska bli allmänbildade om hur världen runt omkring dem ser ut, beter sig och fungerar. Om faster Agda köper en robot och slår på strömmen ska hon inte efter det vara tvungen att lära roboten en massa saker som vi människor tar för givet. Den ska bara veta att en öl står i en kyl i ett rum som är köket. Människor vill inte tala om för roboten hur den ska göra saker, då blir det enklare att göra det själv, säger Patric Jensfelt.
Han medger dock att även vi människor ibland har vissa brister, och kanske är tvingade att öppna en kyl eller diskmaskin för att se vad som är vad. En sådan handling kan även robotar vara tvungna att göra för att se skillnaden.
För mer information, kontakta Patric Jensfelt på 08 - 790 67 31 / patric@csc.kth.se eller Alper Aydemir på 08 - 790 67 25 / aydemir@kth.se.
Peter Larsson