
Enabling robots to rethink
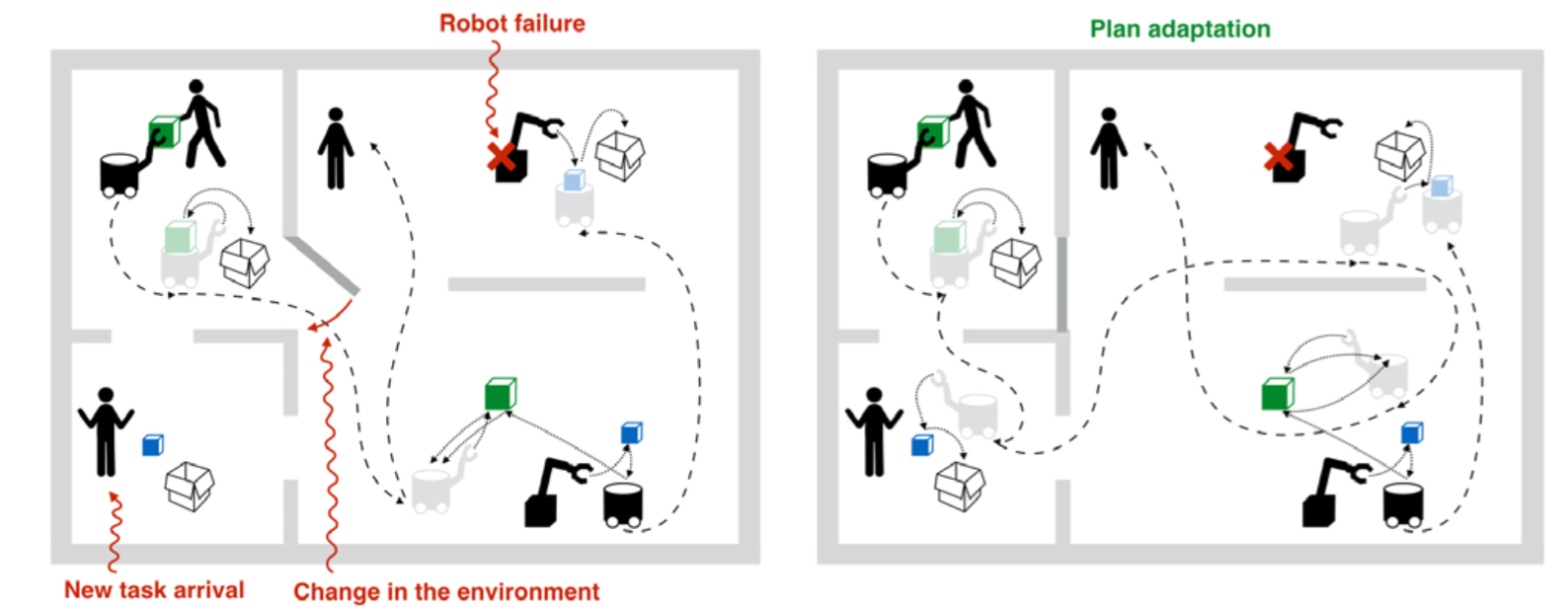
Imagine an industrial setting. A team of robots has been given the task of transporting boxes from one place to another, but (!) a truck has mistakenly put a huge delivery in front of them. An error of this kind would cause the system to halt, require human intervention and restarting. But this could soon be about to change.

In modern industry, the use of multiple robots is very common. Robots are often programmed with coordinators that are based on offline, centralized plans leaving no or little
room for real-time, decentralized actions. This means that sudden changes in environment and tasks would cause the system to stop and need assistance.
But in the new EU project Co4Robots , researchers hope to develop methods that will allow robots to evaluate and make decisions according to the current situation instead of just pre-programmed data.
“The project deals with collaborative planning and control of multiple heterogeneous agents”, says Dimos Dimarogonas, professor in Automatic control and project coordinator for Co4Rbots. “Heterogeneity is related to the fact that we consider both robotic platforms and humans. The robots may or may not be equipped with manipulators to grasp and transport objects and they might also have different mobility capabilities”.
He continues, “Tasks are given to the system in the form of user friendly formal verification languages and we use tools from hybrid control systems theory to orchestrate the coordinated planning and control design to fulfil this task in real-time and in a distributed manner. Applications include service robotics in office environments where robots perform logistics tasks in interaction with human users as well as real-time collaborative object transportation in industrial premises.
The project aims to build a systematic methodology to accomplish complex specifications given to a team of robots, perceptual capabilities that enable robots to localize themselves and estimate the state of the dynamic environment, control schemes appropriate for the mobility and manipulation capabilities of the considered robots, and their systematic integration approach. Project partners Bosch and PAL Robotics sees great usage for the technology within industry.
“The service robotics and manufacturing applications we are developing will be of benefit for the industry. Our vision is that the developed framework will lead to an improved use of resources and a faster accomplishment of tasks inside public facilities and workspaces with high social activity and contribute towards the vision of more flexible multi-robot applications in both professional and domestic environments. It fits well in the view of the “Industry 4.0” vision”, says Dimarogonas.
Co4Robots is done in collaboration between KTH, Bosch, NTUA, PAL, FORTH and UGOT. It will go on until the end of 2019.
Contact
