
Automatic Control Project Course 2014
As a cooperation between vehicle dynamics students and automatic control students from KTH, a project was launched to build up basics for an autonomous path following functionality for the KTH research concept vehicle (RCV).

By constructing a system model, utilizing sensors of the RCV, state estimation and a model predictive controller, a framework for autonomous driving was implemented.
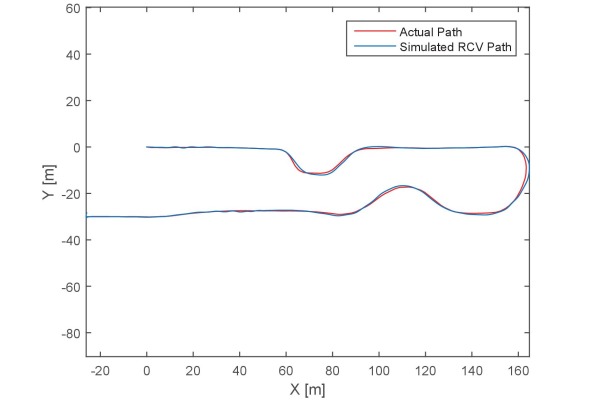
Simulation results have shown promise while real life testing suffered from the unpredictable Swedish weather. Simply input a start coordinate, an end coordinate and potential checkpoints and the path generator will construct a driving route, which is used as reference for the control logic. The example underneath shows a generated path in red and a simulated trajectory of the RCV in blue.
The framework is modular and easy to extend with for example collision avoidance, lane changing algorithms, parking algorithms and so forth. If you want to know the details of the project please look to the project report.
Automatic Control Project Course students (2014)