
Event-triggered Attitude Control of a Quadcopter
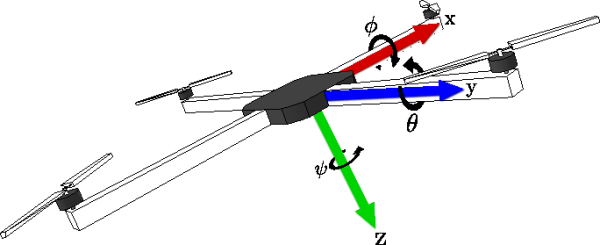
A quadcopter helicopter requires constant monitoring of its attitude in order to remain stable in flight. To be able to navigate in 3D space, an attitude reference is generated and an on-board controller regulates the rotation speed of each motor in order to follow it. The control values are traditionally generated in a periodic fashion.
An alternative to this traditional framework is to periodically monitor the state and only compute new values for the command signals when some event occurs, usually related to the stability properties of the closed loop system. This allows for savings in the computational effort, if long idle periods occur and, conversely, makes way for punctual increases in the control update frequency, if, for instance, the system is subject to an unexpected disturbance.
This thesis dealt with the study and implementation of a non-linear and saturating attitude controller for a quadcopter and the consecutive derivation and implementation of event-triggering functions to work with it. Two rules were derived, one that ensures the stability of the system using a Lyapunov based approach, the other a relaxed version that is less conservative. Finally, a model independent heuristic rule was simulated and tested as well.
Diogo Almeida
Diogo Almeida's Master's Thesis (pdf 834 kB)