2016, Pure Pursuit Controller for Model Truck Platoons
Platooning has become a natural part of any truck development, but the concept is still so new there is no obvious solution for its control. In the first stage of an experiment with a new setup for network communication and the control of a truck platoon, Simon Kregting from TU Eindhoven has developed a Simulink based pure pursuit controller for the radio controlled trucks in the Smart Mobility Lab.

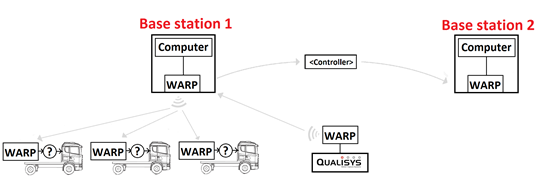
By now platooning is a well known concept for anyone working with trucks, even though there are no large scale applications of it yet. The Smart Mobility Lab and the Communication Theory Lab are coming together to model the real-time handover of an external platoon controller. The long term goal is to setup a communication network consisting of a truck platoon and multiple base stations positioned along a model highway and subsequently show how the platoon controller is handed over from base station to base station as the truck moves along the road based on proximity. The esperimental setup makes use of a platoon of radio controlled trucks and so called WARP boards for communication. The Qualisys positioning system installed in the Smart Mobility Lab is used to model GPS:s for the trucks, as illustrated in the figure below.
This stage of the experiment considers merely a simple closed loop highway, one truck, one base station and positioning data from Qualisys. The low level controller has been developed by Akshay Kumar Burusa during his summer internship in the SML and implemented on an Arduino to control propelling, gearing and steering. The low level controller in turn gets input from the high level controller modeled on a PPC concept in Simulink.