
Ronald Cumbal Guerron

About me
In 2017 I obtained my master degree in Mechanical and Control Engineering from the Delft University of Technology. During that period of time, I worked predominantly on robotics (March Exoskeleton) and human-robot interaction (Socially-Aware Navigation). The latter marked a milestone for my interest in human-centered robotics and, from this point forward, I've found myself happily immersed in the work of social robots.
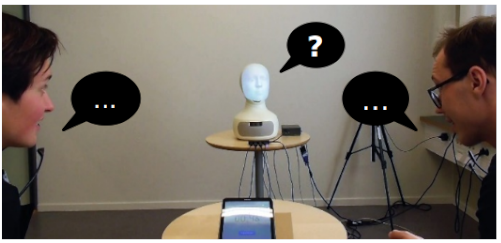
My current research project is focused on conversational robots that assist second language learning, where we attempt to build adaptive systems that improve both the social-emotional state and learning performance of learners coming from multi-cultural backgrounds. Our work has explored the characteristics of uncertainty/confusion in learners participating in a robot-led conversation, the effect of a robot's behavior to influence participation in a group with learners playing a language game and, currently, we investigate how a robot's behaviour should adapt, at individual and group level, to optimize an interaction that will rapport and support the learning process.
Areas of research:
- Social Robots
- Dialogue Systems
- Adaptive Learning
Open Projects:
We are looking for students who are interested in developing the following projects as coursework, theses or separate activities. If you are interested in any of them, please get in touch with us!
 |
(BSc) Adapt verbal and non-verbal expressions of Furhat to increase (task and emotional) engagement. Using detected levels of engagement of a user, Furhat will adapt it’s dialogue (phrases) and behavior (intonation and facial expressions) to try to engage the user back to the task and increase participation. The system will be built on top of the game Med Andra Ord [2]. |
 |
(BSc) Social robot vs. Mobile App: Which one is better for practice conversations for language learners: Many language learning apps incorporate different versions of a chatbot to practice short conversations. In the not-so-far future, social robots may replace these apps to support language learning through practice conversations. However, how beneficial each technology is for this specific task is not well-defined, yet. This project attempts to add an answer to this question by testing the same dialogue system on the two different devices. |
 |
(BSc) Improve ASR for Non-native speakers of Swedish. The objective of the project is to improve the recognition performance of commercially available Automatic Speech Recognition systems (i.e. Microsoft Azure) for language learners of Swedish. A dataset of conversations between a robot and non-native speakers is provided. The task can be accomplished by selecting words and phrases (ranked on frequency or importance) to build a grammar list or vocabulary set to improve the Language Model. Other alternatives are encouraged. |
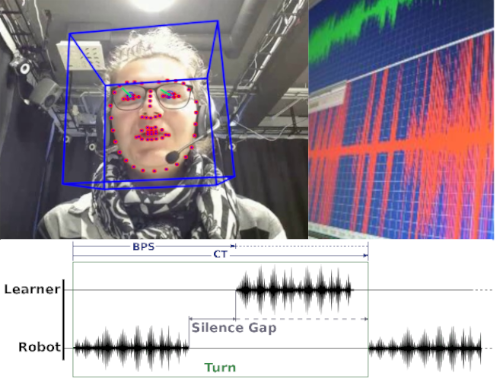 |
(MSc) Deep Learning classification of student confusion with multimodal features: As a follow-up to our work in the Detection of Uncertainty in Conversations with Language Learners [1], we want to explore a Deep Learning approach to the classification of events of confusion during a practice conversation with language learners. The dataset is formed from video recordings of conversations between a pair of participants and a robot. |
 |
(MSc) Automatic guess generation for the game Med Andra Ord (Taboo): Following our work [2], we want to increase the autonomy and robustness of the system that generates game-word guesses given verbal descriptions of that specific game-word. We can provide a dataset of real descriptions to develop and test the system. |
 |
(BSc) Med Andra Ord (Taboo) Web Interface: The current version of the Taboo game uses a tablet as interface with a robot. We want to transfer this system to a web-base interface. Experience Fullstack development is not required, but highly welcomed! |
[1] Ronald Cumbal, José Lopes, and Olov Engwall. 2020. Detection of Listener Uncertainty in Robot-Led Second Language Conversation Practice. In Proceedings of the 2020 International Conference on Multimodal Interaction (ICMI '20). Association for Computing Machinery, New York, NY, USA, 625–629. DOI:https://doi.org/10.1145/3382507.3418873
[2] Sarah Gillet, Ronald Cumbal, André Pereira, José Lopes, Olov Engwall, and Iolanda Leite. 2021. Robot Gaze Can Mediate Participation Imbalance in Groups with Different Skill Levels. In Proceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI '21). Association for Computing Machinery, New York, NY, USA, 303–311. DOI:https://doi.org/10.1145/3434073.3444670
Courses
Multimodal Interaction and Interfaces (DT2140), assistant
Speech and Speaker Recognition (DT2119), assistant