
Planning and Decision Making
Modularity is a key enabler for designing and understanding complex systems. In this research activity we have investigated the use of a new modular task switching control structure called Behavior Trees (BTs). It turns out that BTs generalize a number of earlier control structures, such as Decision Trees, the Subsumption Architecture, and the Teleo-Reactive approach.
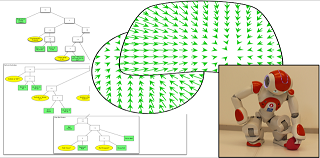
The modularity furthermore enables analysis of system performance across compositions of sub-systems into more complex systems, and also provides a convenient structure for both planning and learning approaches.
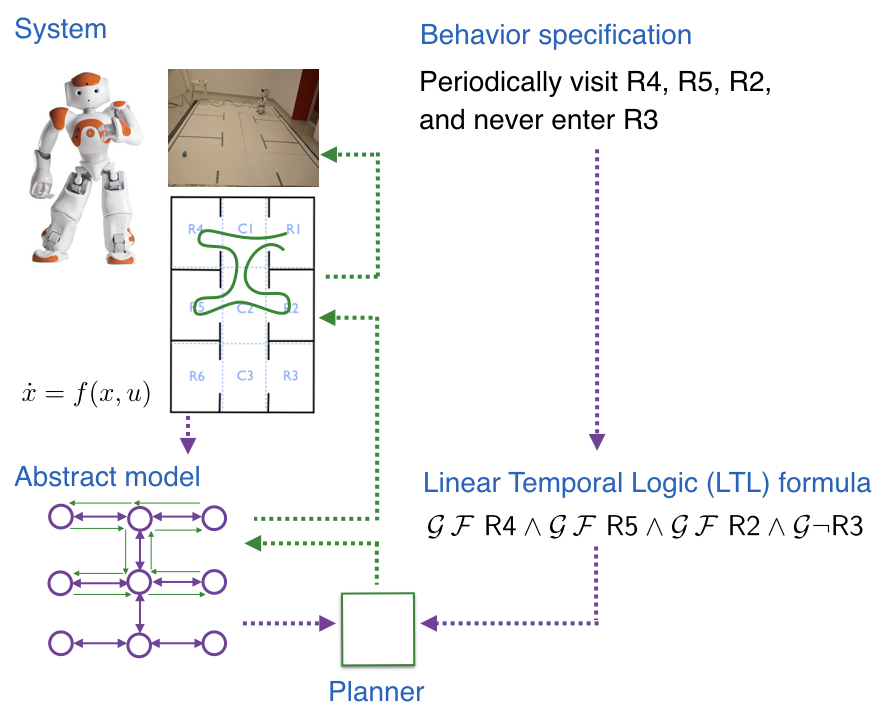
Today's state-of-the-art autonomous robots can do amazing things. They can walk, fly, swim, they can grasp an egg without breaking it, or flip a pancake. And they can accomplish even more complex missions. Driverless cars can navigate through a city, autonomous drones can inspect buildings, and two handed-robots can prepare a pancake from scratch. How do these robots make the right decisions? In our work, we follow one of the recently emerged approaches to decision making, planning, and control in robotics uses results from theoretical computer science, in particular from formal verification. This formal verification-based approach combines two strengths: it creates the possibility to capture complex robotic missions in rigorous, yet user-friendly manner, and at the same time offers provable guarantees on the correctness of the behavior resulting from the robot’s decisions.
Projects
We are currently involved in the following projects:
Contact
For more information, please contact involved faculty members:


