
Research Activity on Mechatronics
Research at KTH Unit of Mechatronics (2021-2023), the Department of Engineering Design
I have also been involved in teaching and research projects concerning embedded systems for motor control, system identification of battery models, and energy optimization of hybrid powertrain systems.
Model Building and Parameters Estimation for Li-ion Battery (2022-2023)
The project aims to develop an battery management system (BMS) for electric vehicle (EV) powertrains with the capability of online estimation as well as anomaly detection.
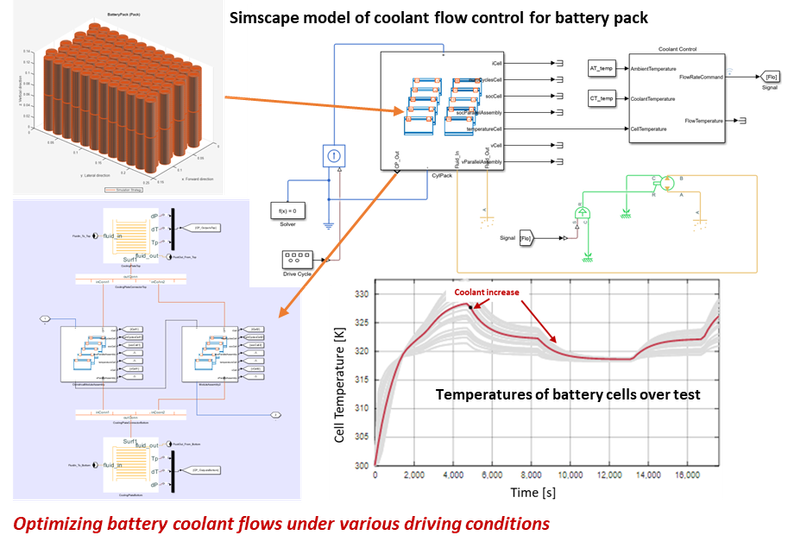
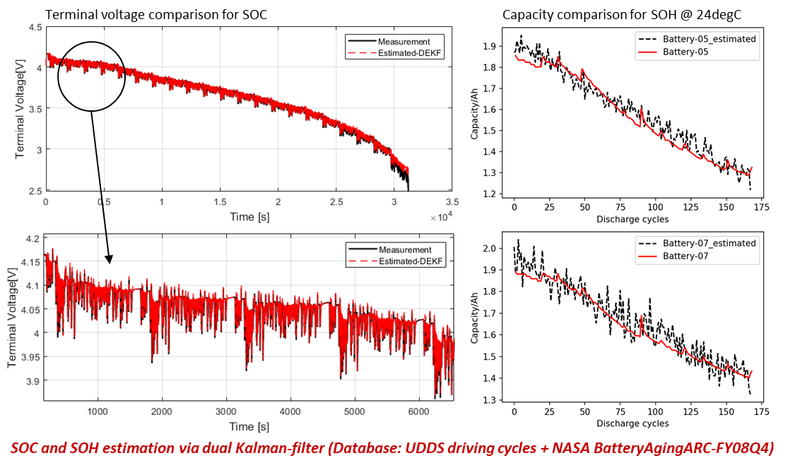
My part in this project is about building lithium-ion battery models in Simulink/Simscape, incorporating estimation theory to:
- Identify Equivalent Circuit Model (ECM) parameters.
- Compares results obtained from the single particle model (SPM) calibrated using the Python library PyBaMM with those from ECM models.
- Model the temperature distribution within a 1D/3D thermal model of the battery pack.
- Estimate SOC and SOH for BMS.
Hybrid Electric Powertrains Modeling and Optimization (2021-2022)
This project starts with modeling vehicle dynamics and hybrid powertrain systems in Simulink to evaluate the vehicle's energy demand across various driving missions. This evaluation is used to analyze the energy requirements for different driving cycles. Following this, driving optimization methods are implemented to minimize energy consumption in various driving scenarios. Subsequently, a more detailed hybrid powertrain model, which compares combustion engines, battery power, and fuel cells, is developed and calibrated in Simulink to assess the system's performance.
Model-based dynamics and control for a motor system (2023)
The project aims to enhance the motor performance and efficiency used in soft robotics, and subsequently, the same algorithm has been implemented in the motor of an electric vehicle. My role in this project encompasses several key aspects:
- Developing mathematical models to simulate motor dynamics with uncertainties.
- Design and implementation of model-based controllers, including H-infinity and MPC controllers, to regulate the motor's behavior.
- System identification to adapt the models to real-world conditions and uncertainties.
