Work at Transport Division
Research at KTH Transport Planning Division, the Department of Civil and Architectural Engineering
This study at KTH from 2016-2018 within the topic “Optimal Construction Operations” results in 2 journal and 4 conference papers.
The research activities involve:
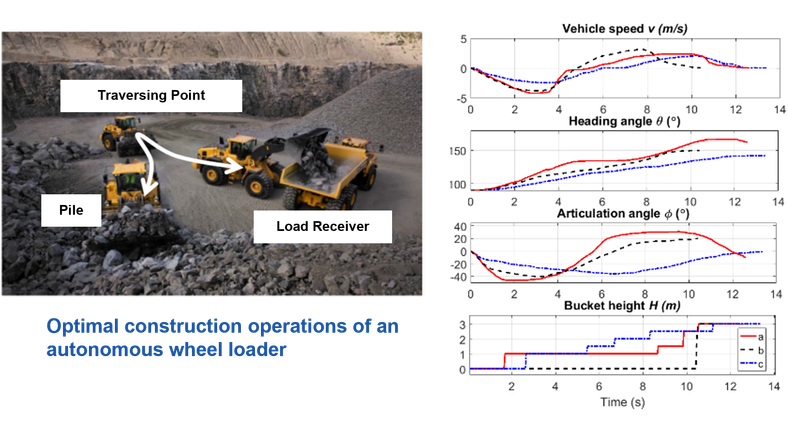
- Motion planning for autonomous wheel loaders.
- Operational patterns and emission measurements of construction vehicles.
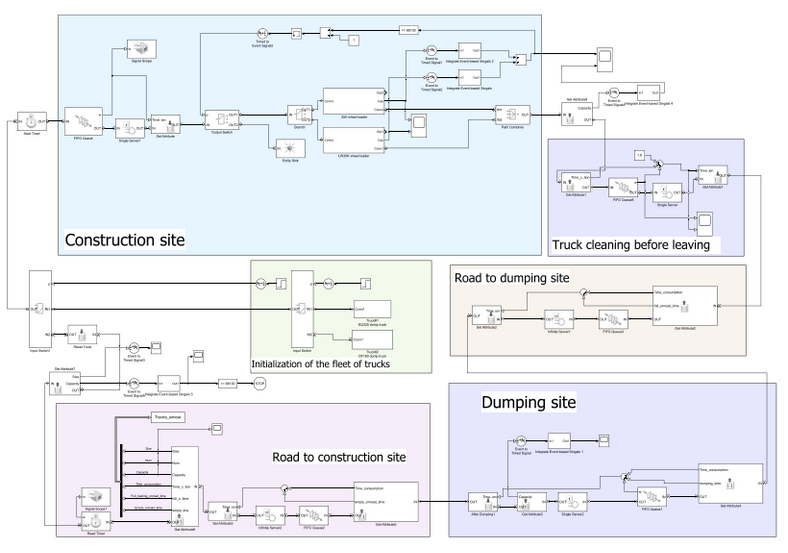
- Discrete-event simulation for optimizing construction operations.
Conference presentation:
- 2018 IEEE Intelligent Vehicles Symposium (IV)
- 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC)
- 2017 Transportation Research Board (TRB) 96th Annual Meeting
- 2016 Transportation Research Board (TRB) 95th Annual Meeting
The research investigates optimal control methods aimed at minimizing fuel consumption and emitted pollutants from the wheel loader during the loading process. The vehicle dynamic model an autonomous wheel loader has been established in Simulink / Simscape based on the measurement data. Then, control-oriented models of the tested wheel loaders are developed in Matlab and Python to integrate with optimization and control algorithm. The path planning has been conducted using optimal control theory and the control methods such as model predictive control, H-infinity.
Related publication: Path planning for wheel loaders: A discrete optimization approach, in 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), IEEE, 2017, pp. 1–6.
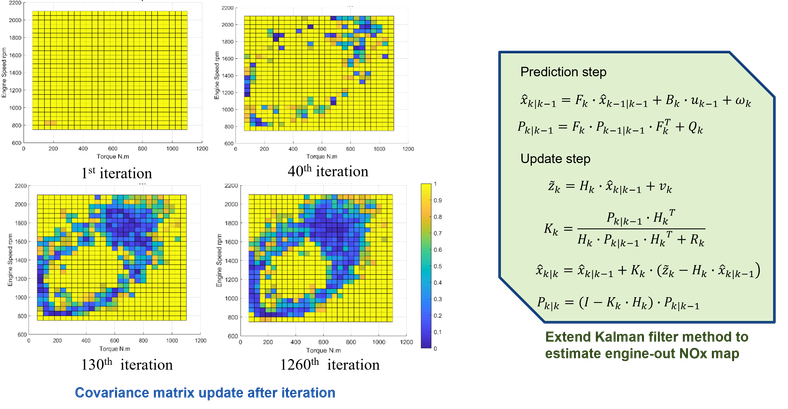
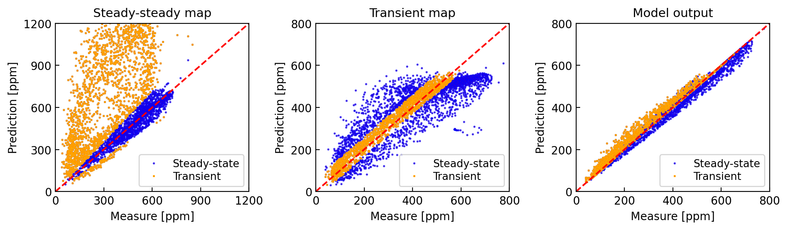
This research project also conducts in-lab test, real-world PMES measurement, and operational pattern analysis for non-road HD vehicles. Various operating patterns are systematically categorized and identified through the application of pattern recognition techniques employing support vector machine. In particular, the trasient and steady operating processes are identified by hidden Markov model. Emission models for construction vehicles were established, and the construction processes were evaluated in a discrete-event simulation and optimized by genetic algorithm.
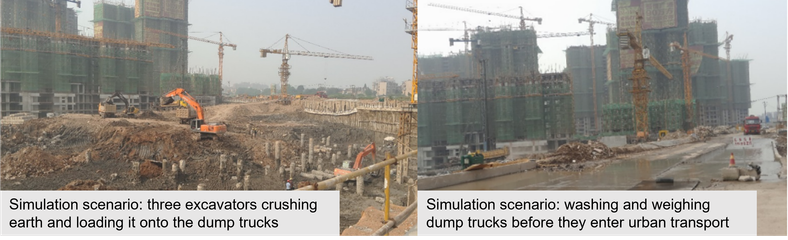
Based on measurements conducted on construction vehicles and equipment, the study assesses the impacts of various operational processes under real-world operational conditions.

A discrete-event simulation platform is developed, integrating the construction operations with the non-road emission model proposed in previous work. This platform aims to evaluate the energy consumption and emission levels of all equipment used during construction operations.