
Hongyi Liu

About me
Background and Experiences
Hongyi Liu got his Ph.D. degree in human-robot collaboration, KTH. He received his BSc in robotics from Southeast University, China, MSc in system control and robotic from KTH, Sweden. Before joining KTH, he worked in ABB Robotics as a data scientist.
Research Interests
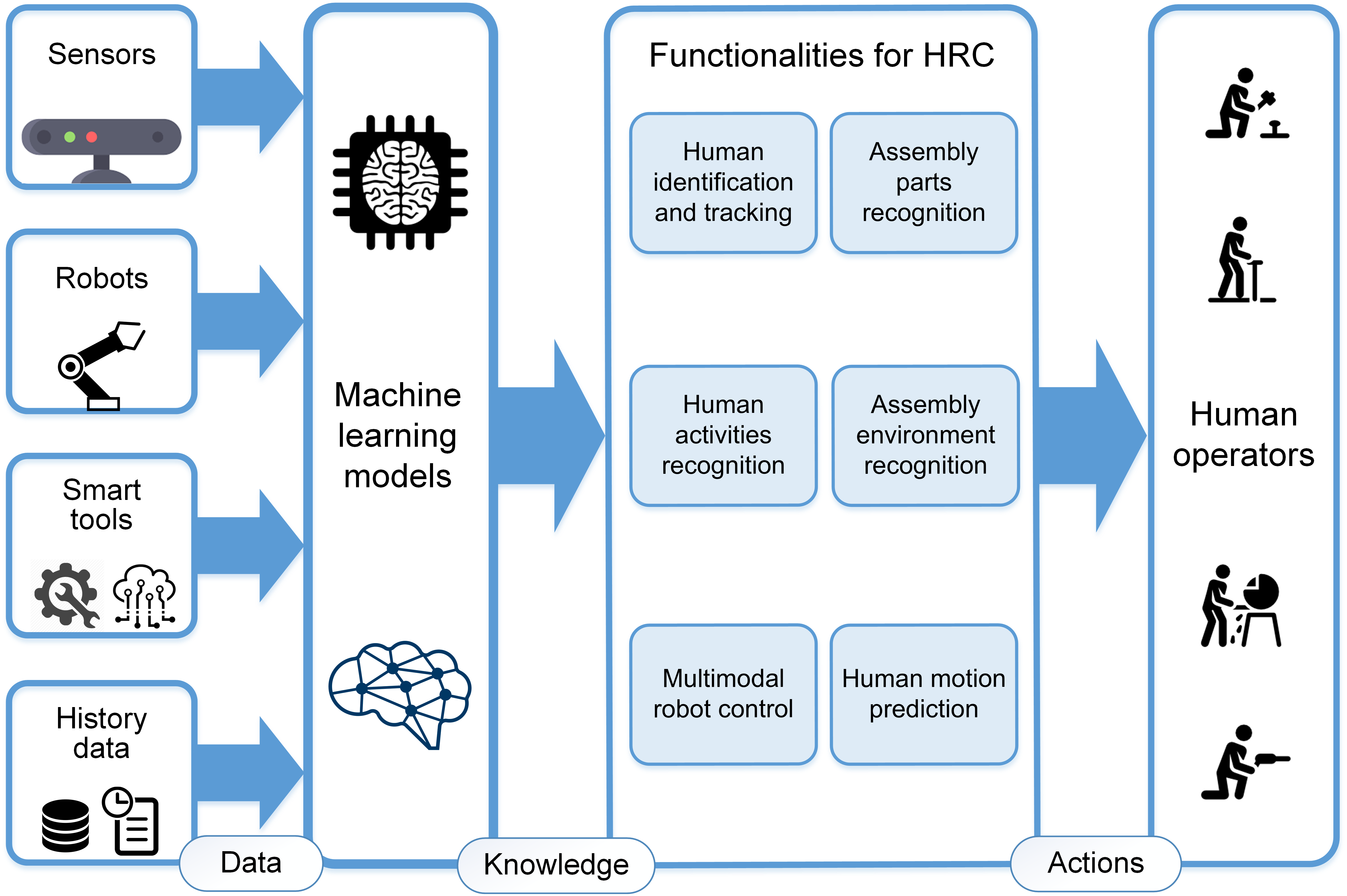
Hongyi's research revolves around context awareness and the application of human-robot collaboration:
- Human motion recognition and prediction
- Multimodal robot control
- Machine learning and deep learning for human-robot collaboration
- Safety issues in human-robot collaboration
- System design and architecture for intuitive robot control
Projects Participation
EU H2020 project. I am currently working as a task leader to lead the task of industrial robot dynamic path planning in the human-robot collaboration environment.
EU H2020 project. I am currently working on gesture command for human-robot collaboration in the project.
Publication List
- H. Liu and L. Wang, "Collision-free human-robot collaboration based on context awareness," Robotics and Computer-Integrated Manufacturing, Vol.67, pp.101997, 2021. https://doi.org/10.1016/j.rcim.2020.101997
- H. Liu. Context-aware human-robot collaboration in assembly. Diss. KTH Royal Institute of Technology, 2020. (PhD thesis) https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1460103&dswid=-6266
- J. Zhang, H. Liu, Q. Chang, L. Wang, and R. X. Gao. "Recurrent neural network for motion trajectory prediction in human-robot collaborative assembly." CIRP Annals – Manufacturing Technology, Vol.69, No.1, pp.9-12, 2020. https://doi.org/10.1016/j.cirp.2020.04.077
- H. Liu and L. Wang, "Remote Human-Robot Collaboration: A Cyber-Physical System Application for Hazard Manufacturing Environment," Journal of Manufacturing Systems, Vol.54, pp.24-34, 2020. https://doi.org/10.1016/j.jmsy.2019.11.001
- H. Liu, T. Fang, T. Zhou and L. Wang, "Towards Robust Human-Robot Collaborative Manufacturing: Multimodal Fusion," in IEEE Access, vol. 6, pp. 74762-74771, 2018. 10.1109/ACCESS.2018.2884793
- H. Liu and L. Wang, "Gesture Recognition for Human-Robot Collaboration: A Review," International Journal of Industrial Ergonomics, Vol.68, pp.355-367, 2018. https://doi.org/10.1016/j.ergon.2017.02.004.
- P. Wang, H. Liu, L. Wang and R. X. Gao, "Deep Learning-Based Human Motion Recognition for Predictive Context-Aware Human-Robot Collaboration," CIRP Annals – Manufacturing Technology, Vol.67, No.1, pp.17-20, 2018. https://doi.org/10.1016/j.cirp.2018.04.066.
- H. Liu, Y. Wang, W. Ji and L. Wang, "A Context-Aware Safety System for Human-Robot Collaboration," Proceedings of the 28th International Conference on Flexible Automation and Intelligent Manufacturing, Vol.17, pp. 238-245, 2018. https://doi.org/10.1016/j.promfg.2018.10.042 .
- H. Liu, T. Fang, T. Zhou, Y. Wang, L. Wang, "Deep Learning-based Multimodal Control Interface for Human-Robot Collaboration," Procedia CIRP of the 51th Conference on Manufacturing Systems, 72 (2018) 3–8. https://doi.org/10.1016/j.procir.2018.03.224.
- Y. Wang, H. Liu, W. Ji and L. Wang, "Realtime Collaborating With An Industrial Manipulator Using A Constraint-based Programming Approach," Procedia CIRP of the 51th Conference on Manufacturing Systems, 72 (2018) 105–110. https://doi.org/10.1016/j.procir.2018.03.012.
- W. Ji, Y. Wang, H. Liu, L. Wang, "Interface Architecture Design for Minimum Programming in Human-Robot Collaboration," Procedia CIRP of the 51th Conference on Manufacturing Systems, 72 (2018) 129–134. https://doi.org/10.1016/j.procir.2018.03.013.
- H. Liu and L. Wang, "Human Motion Prediction for Human-Robot Collaboration," Journal of Manufacturing Systems, Vol.44, Part 2, pp.287-294, 2017. https://doi.org/10.1016/j.jmsy.2017.04.009.
- H. Liu and L. Wang, "An AR-based Worker Support System for Human-Robot Collaboration," Proceedings of the 27th International Conference on Flexible Automation and Intelligent Manufacturing, Vol.11, pp.22-30, June 2017. https://doi.org/10.1016/j.promfg.2017.07.124.
- H. Liu and L. Wang, "Gesture Recognition for Human-Robot Collaboration: A Review," Proceedings of the 7th Swedish Production Symposium. October 2016.
- H. Liu, "Research on Environment for Industrial Robot Performance Evaluation," International Journal on Computer, Consumer, and Control, Vol. 5, pp.19-26.
- H. Liu, "Environment for Industrial RobotPerformance Evaluation" 2015. (Master Thesis) PDF Download