The lab actively contributes to education in Mechatronics by supporting student projects that connect academic learning with real-world engineering challenges. Through a combination of technical supervision, access to our facilities, and integration with our ongoing research, we provide students with opportunities to apply their skills in robot design and mechatronic system development to meaningful, interdisciplinary projects.
The master’s thesis is the final stage where students apply the full mechatronic design process to a research or industry-aligned challenge. In the Robot Design Lab, thesis projects are tightly linked to our ongoing investigations in advanced actuation, integrated sensing, and intelligent control. Students design, prototype, and experimentally evaluate novel robotic concepts, often contributing directly to our scientific output and collaborative projects.
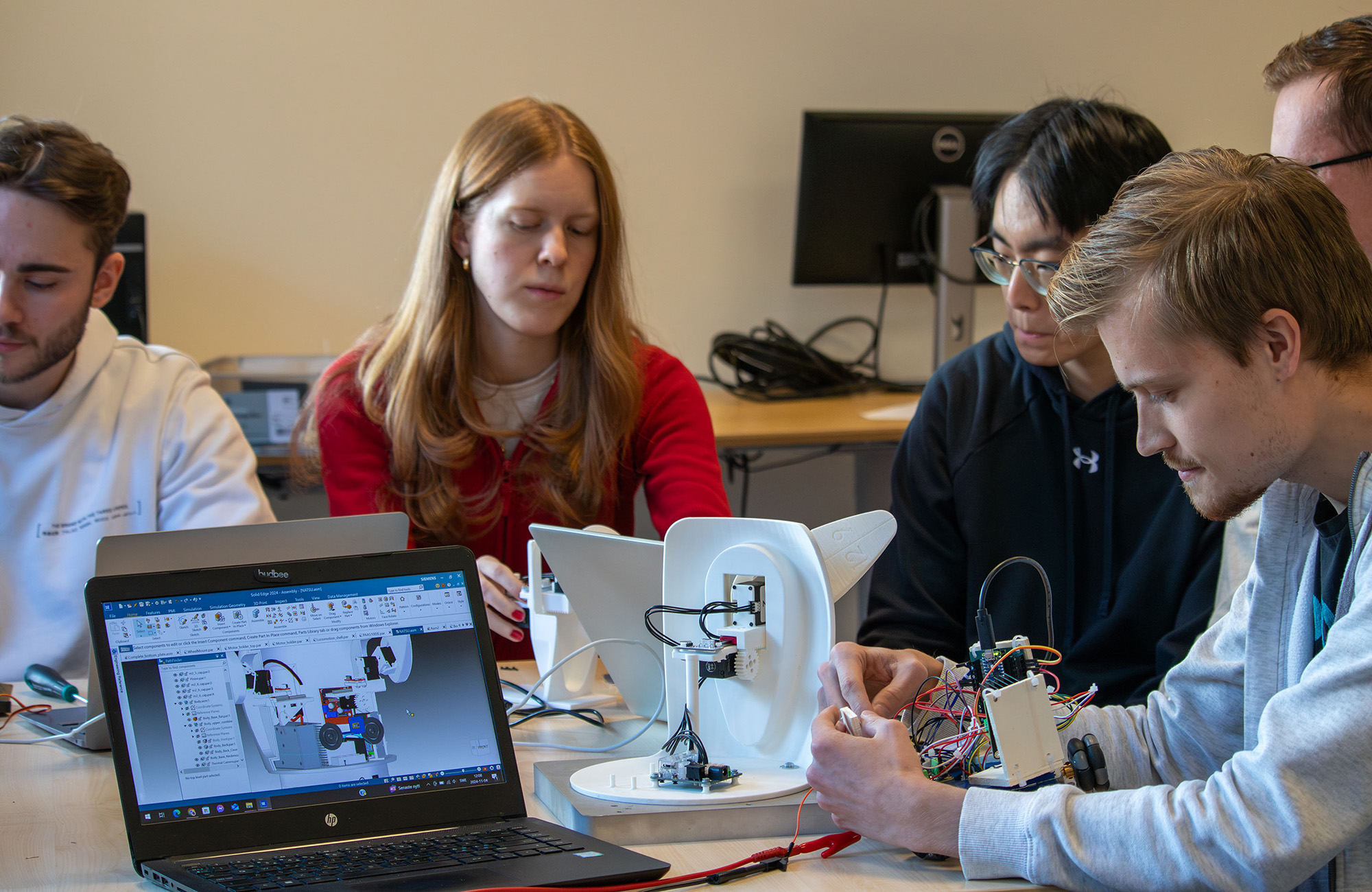
This capstone course challenges teams to deliver a fully functional mechatronic system from concept to working prototype. Within the Robot Design Lab, projects often stem from real research problems — for example, social robots optimized for safe human-robot interaction. Students gain experience in integrated mechanical, electrical, software design, rapid prototyping, and experimental validation, working with our facilities and guidance from lab personnel.
This course provides a platform for smaller-scale but intensive project work, allowing students in the Robot Design Lab to explore focused aspects of our research. Projects might involve developing modular robotic joint with flexible components, or validating a novel motion mechanism controlled under real-world conditions. The emphasis is on hands-on prototyping, integration, and experimental assessment, which is ideal for preparing students for larger thesis or capstone projects.
This course addresses safety as a core design criterion for mechatronic systems, a perspective critical to the Robot Design Lab’s work on human-centered robotics. Students learn to embed safety considerations into the design process from the outset, applying hazard analysis, risk assessment, and human–machine interaction principles. In the lab context, this knowledge directly informs our prototyping practices for collaborative and assistive robots operating in close proximity to people and their environment.