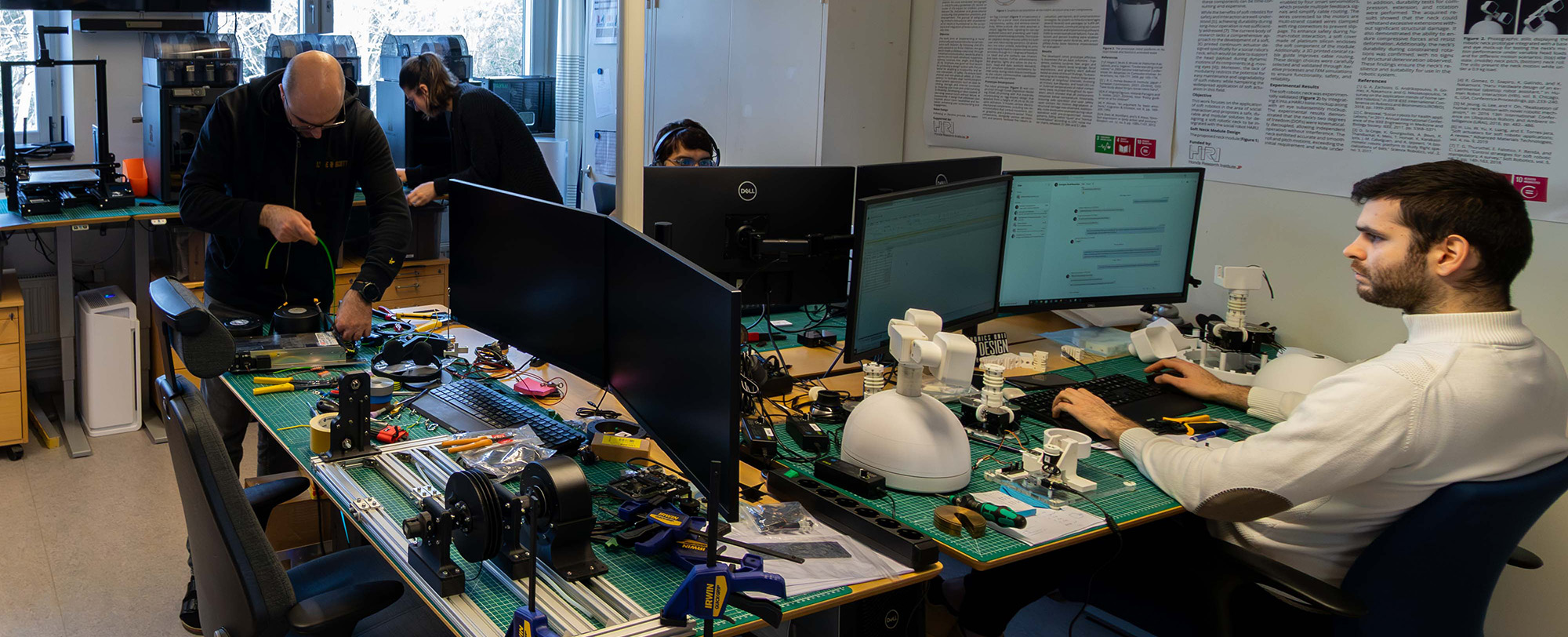
Our lab offers a research-focused environment for the design, optimization, and experimental evaluation of robotic systems addressing both industrial challenges and societal needs. Our facilities are built to support the complete mechatronic design process, bringing together design optimization, multi-material prototyping, integrated sensing, real-time motion control, and experimental evaluation.
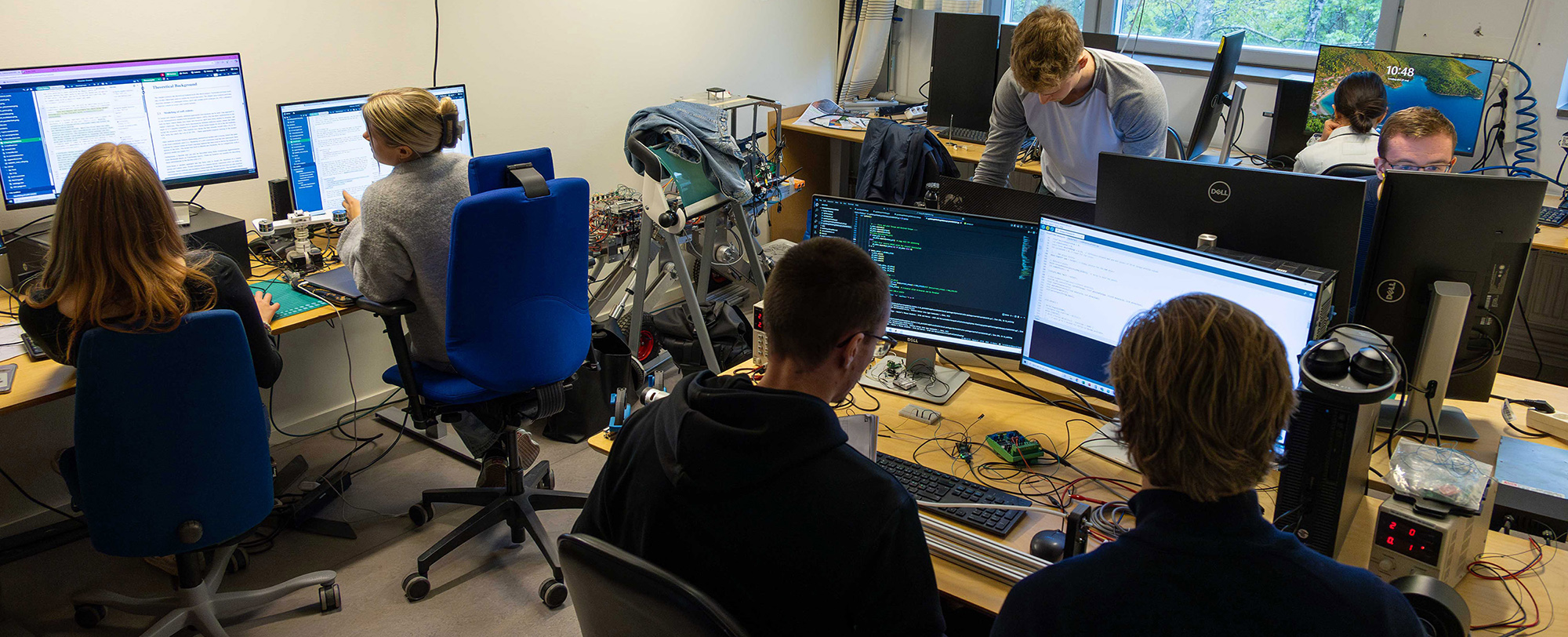
Workstations equipped with advanced CAD, CAE, and FEM analysis tools for conceptual design, mechanical simulation, and optimization of robotic systems. The lab also provides access to robotics middleware, physics-based simulators, and other software environments that support the complete design cycle from early-stage ideation to validated, functional prototypes.
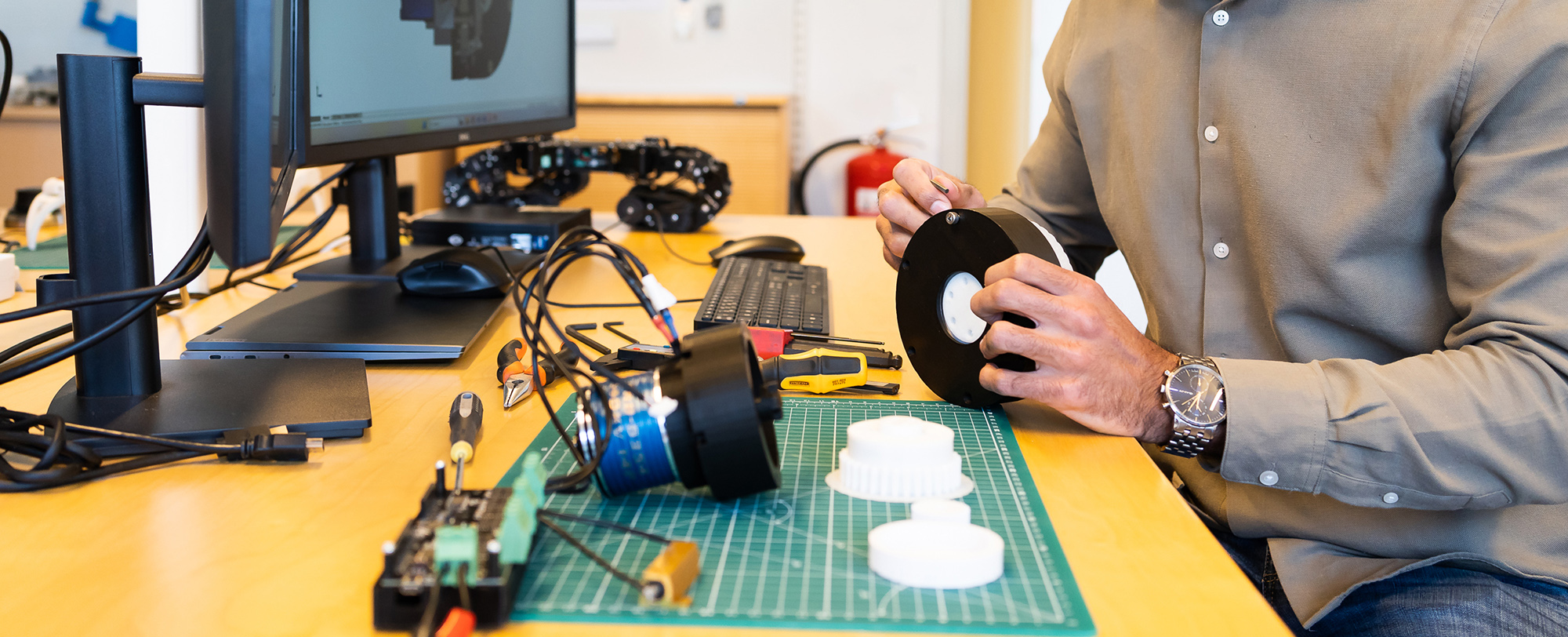
Multi-material 3D printers (FDM, SLA, SLS) for rigid and soft components, a range of printing consumables, and materials including polymers, composites, and silicones for soft robotics applications.
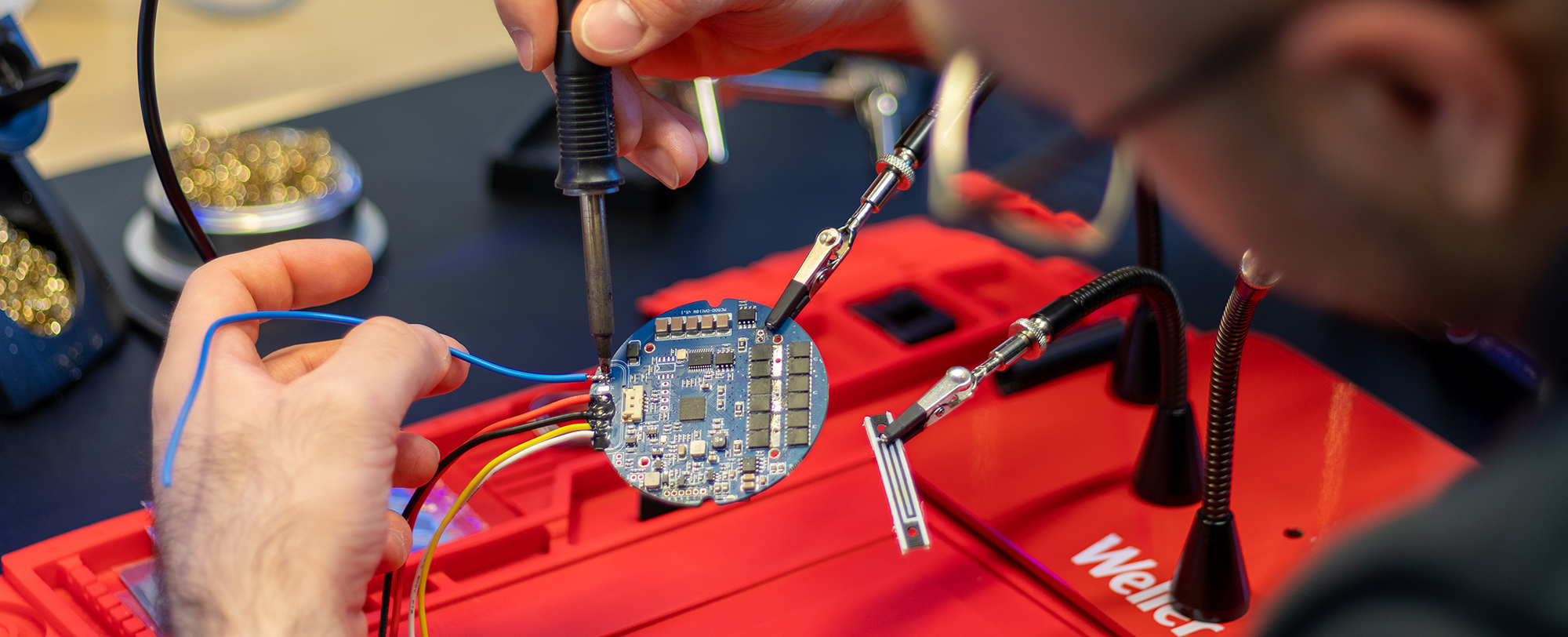
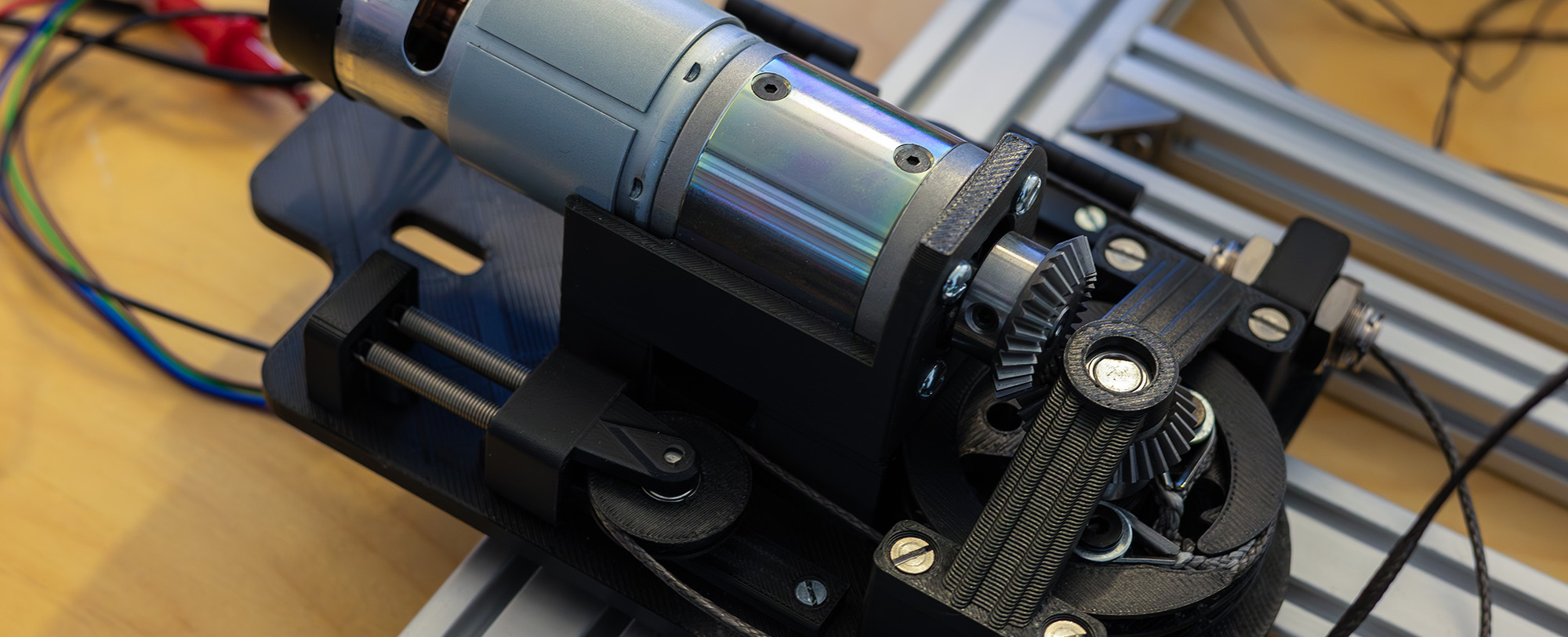
Dedicated electromechanical workstations equipped for assembly, wiring, soldering, and integration of mechanical, electronic, and control components, including tools for rapid prototyping of custom parts and circuits.
Equipment for structural modeling and characterization, force and torque measurement, dynamic load testing, and environmental simulation to assess performance and reliability.
VICON motion capture systems, several Oculus VR headsets, and a variety of embedded and external sensing technologies for tracking movement, monitoring interaction, and validating robotic performance.
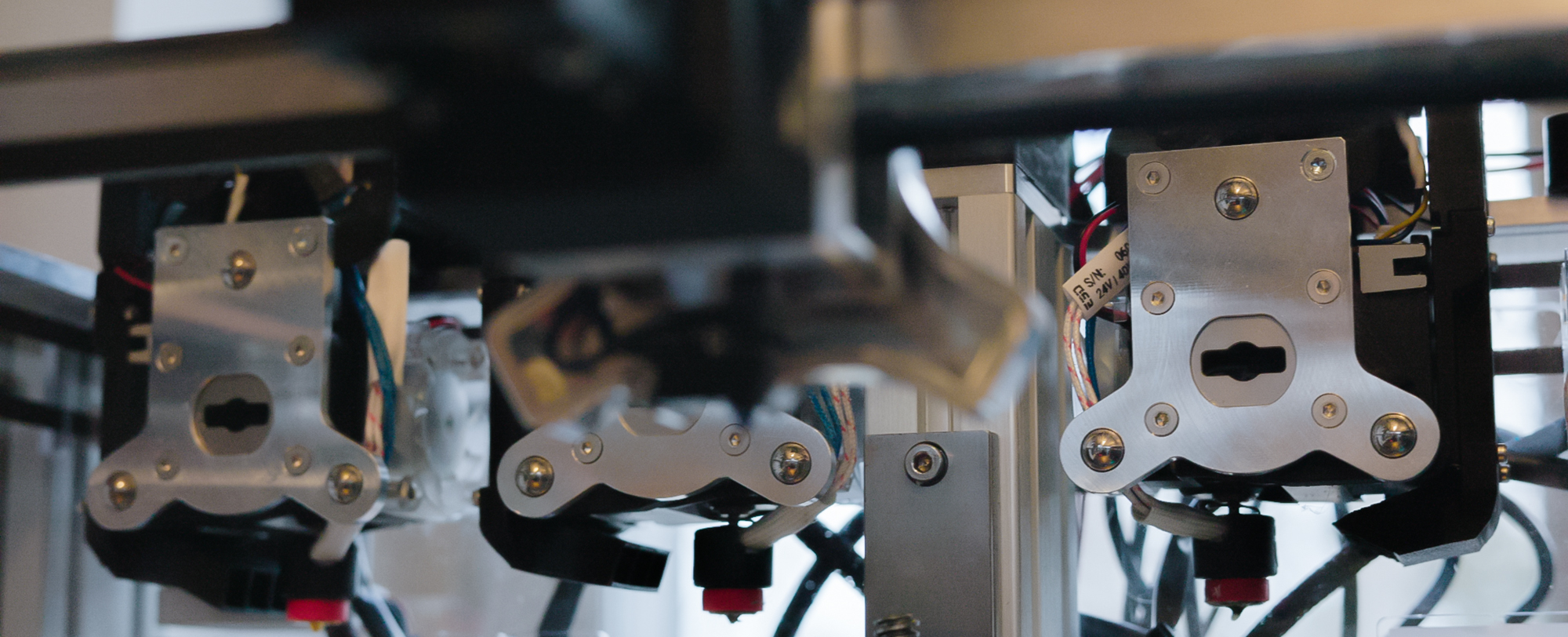
Mobile, stationary, and wearable robotic systems designed and developed in-house, serving as testbeds for applications in assistive, industrial, and exploratory robotics.