
Matthieu Barreau

Assistant professor
Details
Researcher
About me
| Hiring |
|---|
| No current hiring.
I am always looking for passionate and talented MSc students for internships or master thesis. Please contact me directly. |
I am an Assistant Professor within the division of Decision and Control Systems at KTH, a WASP Fellow, funded by the Knut and Alice Wallenberg Foundation, as of September 2023.
I was an algorithm developer/research manager at Tobii and previously a postdoc researcher with Karl Henrik Johansson at KTH. I completed my Ph.D. degree under the supervision of Alexandre Seuret and Frederic Gouaisbaut in LAAS, Toulouse, France.
On my website, you can find a list of my publications with the Matlab/Python/Julia code used for them (if I took the time to upload it correctly on GitHub). For more information, feel free to contact me.
Research profile
Optimization of performances and stability analysis of infinite-dimensional dynamical systems are at the core of my research activities. It translates into a semidefinite optimization problem under constraints such as stability, saturation, sampling, or delayed control. I actively participate in theory developments and applications in this field.
I am interested in both finding the exact solution to the aforementioned optimization problem, using relaxations to get a semidefinite program, and approximating a solution using machine learning techniques. I then use tools from robust control, such as Lyapunov functions and Integral Quadratic Constraints (IQCs), in combination with Physics-Informed Neural Networks (PINNs - see the video on the right). The latter are traditional feedforward neural networks whose output has been enriched by its derivatives with respect to its inputs. This consequently leads to a learning problem under the constraint that the differential equation must hold.
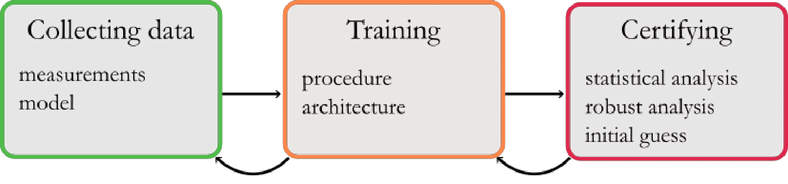
My research expertise and interests are described in the figure above. They consist of three steps and their relations between them. It can be summarized as follows.
-
What can I expect from my data?
Depending on the sparsity in the measurements, the quality of the signals, and the fidelity of the model, one can decide on the problem type. In the more restrictive case, one can simulate the system and infer its state relatively far from measurements; this is a digital twin framework. In case of more data, one can start estimating uncertain parameters in the model or propose a richer dynamic. Long-term inference can also be made possible. -
How can I train a PINN?
Training a PINN is like solving a learning problem under constraints. There are then different methodologies coming from constrained optimization, mainly Lagrangian relaxations. This choice is highly correlated with the type of problem discussed previously and the limited training time. The architecture of the neural network also reflects the a priori knowledge of the system and affects the computational/memory burden. -
Which tool do I need to attain the desired level of certification?
Finally, the last step is to evaluate the quality of the training. The general approach tends to consider the inherent stochasticity of the training process and gives confidence intervals on the inference. A more formal approach evaluates the solution using IQCs to ensure that the signal has the desired level of performance. Once the PINN is trained, this can also be used as an initial guess to standard algorithms already certified. This last step can also be tackled first, depending on the problem.
These three questions shape the methodology that I am applying in my projects. My research is focusing on re-interpretation and coupling between system theory and machine learning. This is conducted in an international environment, mainly with researchers from all over Europe and the US.
There is a recorded talk I gave for Digital Futures as an introduction to Physics-Informed Neural-Networks.
Fundings
My research is partially funded by Human Horizon project Ultimate, the Swedish Foundation for Strategic Research, the Swedish Research Council, and Knut and Alice Wallenberg Foundation.
Collaborators
This research about traffic application is under the supervision of Karl-Henrik Johansson, in collaboration with Anton Selivanov (The University of Sheffield), Christophe Prieur (Gipsa-Lab), John Liu (KTH), and Miguel Aguiar (KTH).
The stability analysis of linear infinite-dimensional systems is done jointly with Alexandre Seuret, Frederic Gouaisbaut, and Carsten Scherer.
About me
I received my Engineering Degree from ISAE-ENSICA (Aeronautical Engineer) and a double degree with KTH in 2015.
I got my Ph.D. diploma in July 2019. My Ph.D. thesis was on this subject with the concrete application of stabilization of a drilling pipe. The manuscript is available in the publication section of this website. For this work, I received the Best French Ph.D. award in control theory (by GdR MACS and Club EEA) in 2020.
#trafficcontrol #trafficobservation #physicsinformeddeeplerning #lyapunovmethod #burgersequation #infinitedimension
Courses
Degree Project in Computer Science and Engineering, Second Cycle (DA239X), examiner
Degree Project in Computer Science and Engineering, Second Cycle (DA250X), examiner
Degree Project in Computer Science and Engineering, Second Cycle (DA231X), examiner
Degree Project in Electrical Engineering, specialising in ICT Innovation, Second Cycle (EA258X), examiner
Hybrid and Embedded Control Systems (EL2450), teacher
Nonlinear Control (EL2620), examiner, teacher, course responsible
Scientific Machine Learning for Modeling and Control of Dynamical Systems (FEL3751), examiner, course responsible
The Sustainable Systems and Control Engineer (EL2220), teacher