We use hands to tie shoes, write, wash dishes, play the piano: these tasks involve close and complex interaction with objects and we can execute them even if one of our hands/arms/fingers is injured or not functioning properly. Our dexterity and sensory capabilities have developed through a long process of evolution - however, for the above tasks, coupling the sensing and dexterity with efficient representations, planning and execution is necessary.
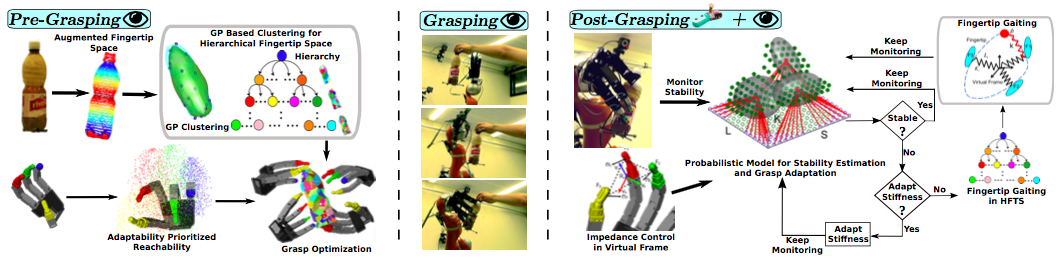
An example of a grasping system (from Hierarchical Fingertip Space: A Unified Framework for Grasp Planning and In-Hand Grasp Adaptation K. Hang, M. Li, J. A. Stork, Y. Bekiroglu, F. T. Pokorny, A. Billard and D. Kragic, IEEE Transactions on Robotics, 2016)
Compared to humans or primates, the sensing and dexterity of today’s robotic hands and medical prostheses is extremely limited. The latter commonly have only a single degree of freedom allowing them to grasp and manipulate a limited set of objects. Replicating the effectiveness and flexibility of human hands requires a fundamental rethinking of how to exploit the available mechanical dexterity. Some of the problems we address in this area are: i) multisensory integration for grasping, ii) knowledge representation and task based grasping, iii) in-hand manipulation, iv) human hand tracking and modeling.
Projects
We are currently involved in the following projects: