Robot Design at KTH Engineering Design focuses on the creation of agile, modular, and safe robotic systems by integrating mechanical design, advanced materials, compliant actuation, sensing, and intelligent control. Our work emphasizes both fundamental methodologies and applied demonstrators that enable robots to adapt and collaborate in complex, human-centered environments.
The robotics field is constantly evolving with new technologies and materials being developed and tested. At KTH Mechatronics, the focus is on the use of additive manufacturing, smart materials, integrated sensors, compliant actuators, control systems and applied artificial intelligence to design, develop and control agile, modular and multi-purpose robot systems.
Our roadmap is driven by the vision of next-generation robotic systems that can operate safely and effectively in close interaction with humans and the environment:
Soft Robotics
Development of compliant mechanisms with focus on tendon-driven actuation
Platforms such as
REMA
and HARU integrate soft robotic joints for safe, expressive, and socially engaging interactions.
Application areas include child–robot interaction, rehabilitation, and socially intelligent robotics.
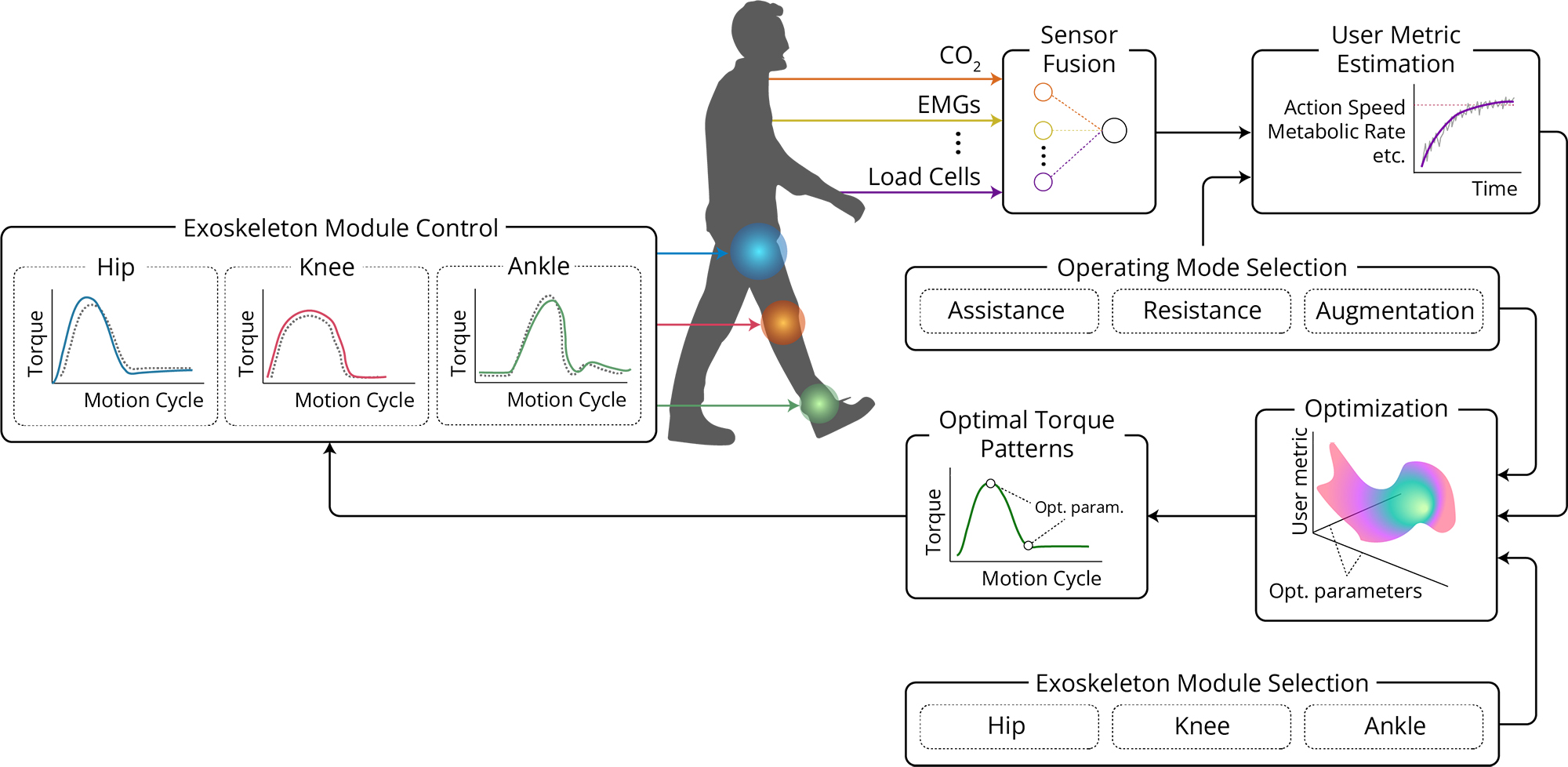
Human-in-the-Loop Optimization (HILO)
Real-time personalization of wearable and assistive systems.
Projects such as EXHILO 2 demonstrate modular exoskeletons with adaptive control based on user feedback and performance.
Data-driven modeling and simulation of gait to optimize prosthetic designs.
The SocketSense project developed smart prosthetic sockets with embedded sensing for improved comfort and mobility.
Focus on biomechanical fidelity, user-specific adaptation, and system co-design.
Field and Forestry Robotics
Robotic solutions for unstructured and demanding environments.
The Wildcat project developed autonomous forest robots for sustainable operations, combining advanced sensing, mobility, and human–machine collaboration.
Broader applications include robust locomotion and perception in outdoor settings.
4D Printing and Adaptive Structures
Integration of additive manufacturing with smart materials to create morphing and reconfigurable robotic components.
The project contribution to IRIS advanced soft robotics enabled by 4D printing and machine learning for adaptive morphologies and intelligent material systems.
Applications in actuation, sensing, and lightweight structural design.
Projects
AKI: A Child-Centered Social Robot Platform for Safe Interactions
The AKI project was initiated by the Robot Design Lab at KTH in 2022 and has since been carried out by MSc students of the Mechatronic Capstone Course (MF2121) and the Degree Project in Mechatronics (MF214X / MF224X). AKI is a tabletop robot designed as a platform for advancing human–robot interaction with children. Through successive student projects, AKI has undergone iterative design cycles focusing on safety, reliability, and expressive interaction, evolving into a versatile and expandable research platform.
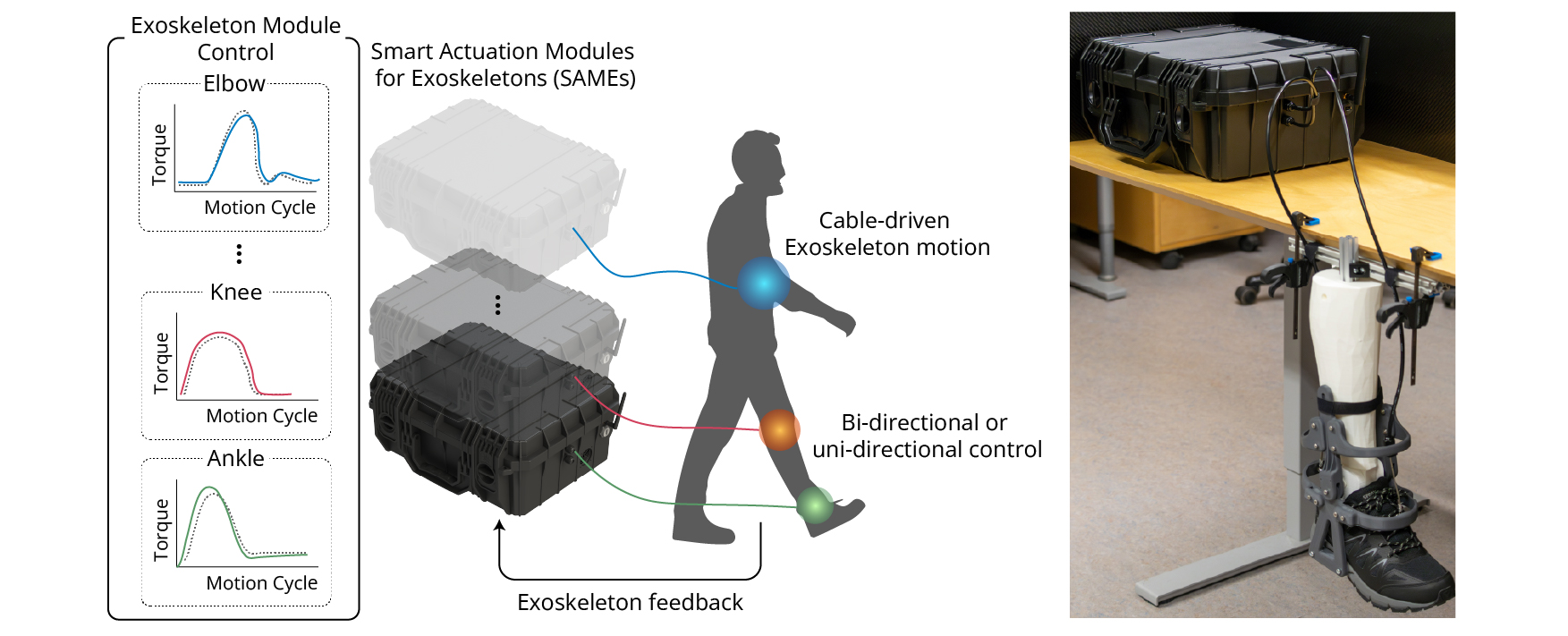
EXHILO 2: Advancing Real-time Exoskeleton Control for Human-in-the-Loop Optimization
This project advances the modular lower-limb exoskeleton platform initiated in the first demonstrator project EXHILO. In this second phase, the project focuses on duplicating and validating the actuation modules, implementing and testing a broader set of Human-in-the-Loop (HILO) control strategies, and integrating the modules with prototype exoskeleton structures with the goal of validating the overall solution. Together, these developments aim to establish a reliable and adaptable platform for personalized exoskeleton assistance, supporting both laboratory research and clinical evaluation.
EXHILO: Real-time exoskeleton control for human-in-the-loop optimization
The project goal is to develop a modular lower-limb exoskeleton prototype equipped with off-board actuation and a flexible digital control interface. The system enables Human-in-the-Loop (HILO) optimization, where assistance strategies are automatically tuned in real time to each user. This approach supports adaptive, personalized exoskeleton control and accelerates research into wearable robotics.
HARU: On the compliance, reliability and motion control of a tabletop robot
HARU is a socially intelligent tabletop robot developed by the Honda Research Institute Japan to explore long-term human–robot interaction in everyday environments such as schools, hospitals, and homes. Safe, engaging human–robot interaction must begin in the earliest design stages. Rigid components can pose safety risks and be costly to adapt, while soft robotics provides a safer and more expressive alternative, but often falls short on reliability over long-term use. At the Robot Design Lab (KTH), our project builds on the HARU platform and applies a mechatronic design methodology, where we integrate compliant structures, soft robotic actuation, sensing, and advanced control, with the goal to ensure motion that is expressive and immersive, yet also safe, durable, and dependable during extended operation.
IRIS: Novel Mechatronic Systems and Soft Robotics enabled by 4D Printing and Machine Learning
This research studies 3D and 4D printing with smart materials and the application of these technologies to the design and manufacturing of mechatronic systems and soft robots.
REMA aims to rethink how exoskeletons can support mobility in aging populations by combining physical functionality with psychological and emotional care.
The project aims to develop an innovative medical IoT system with wearable sensors and AI technologies for effective operation perception and design optimization of prosthetic sockets.
The use of remotely controlled robots is proliferating in support of (pre-)first responders during disaster management. Most attention is focused on the response phase, when robots e.g. can traverse difficult terrain. However, there are also substantial benefits to be gained through the use of this technology during the prevention/mitigation, preparedness and recovery phases.