
EXHILO: Real-time exoskeleton control for human-in-the-loop optimization
The project goal is to develop a modular lower-limb exoskeleton prototype equipped with off-board actuation and a flexible digital control interface. The system enables Human-in-the-Loop (HILO) optimization, where assistance strategies are automatically tuned in real time to each user. This approach supports adaptive, personalized exoskeleton control and accelerates research into wearable robotics.
Background
Musculoskeletal disorders are a major cause of long-term disability, and exoskeleton technologies have the potential to improve mobility and reduce strain. However, adoption beyond research labs has been limited, in part due to difficulties in adapting devices to the needs of diverse users.
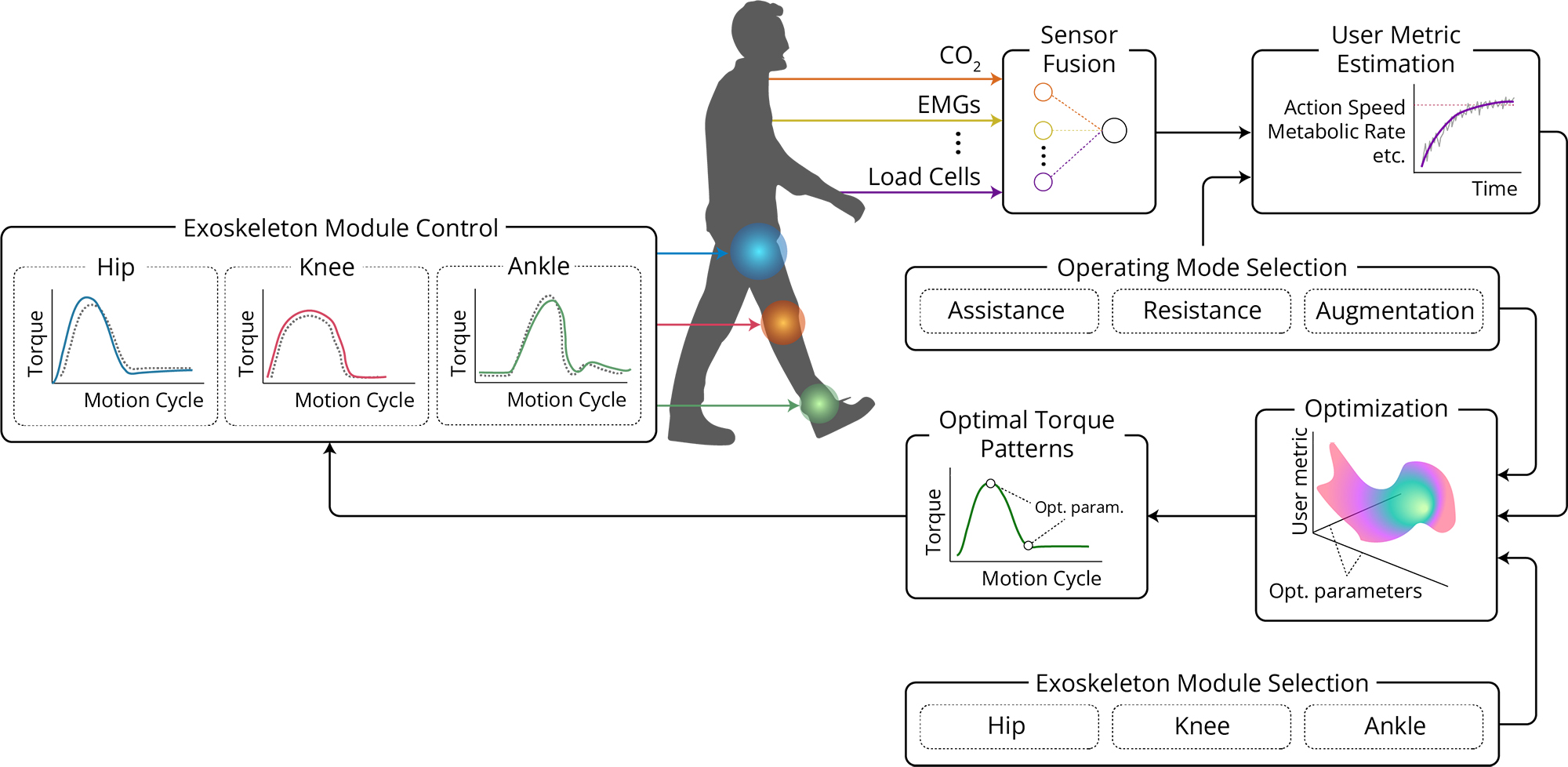
Human-in-the-Loop optimization (HILO) is a method in which control parameters of an exoskeleton are continuously adjusted based on real-time measurements of user performance (e.g., energy cost, kinematics, or subjective comfort). This makes it possible to personalize assistance dynamically, improving both user acceptance and functional outcomes. The mission of EXHILO is to demonstrate how HILO methods, combined with modular hardware, can make exoskeleton testing more flexible, reliable, and user-centered.
This project brings together expertise from the Promobilia MoveAbility Lab (biomechanics) and the Robot Design Lab (mechatronics). The collaboration bridges these two fields, enabling an integrated approach to both human-centered testing and robotic system development.
Our Contribution
The Robot Design Lab contributes with the design and integration of the modular system architecture, enabling off-board actuation and real-time control. In parallel, we investigate and implement Human-in-the-Loop algorithms, such as CMA-ES, to dynamically adapt torque profiles based on user performance. We also develop and demonstrate prototypes to validate the feasibility of personalized assistance strategies during walking experiments.
Sustainability Goals
With this project we aim to improve health and well-being in all genders, reduce inequalities and participation of marginalized populations (UN sustainable development goals 3, 5, 10).

Funded by
Project Duration
2022-2024
Contact
