
EXHILO: Exoskelettkontroll i realtid för "human-in-the-loop" optimering
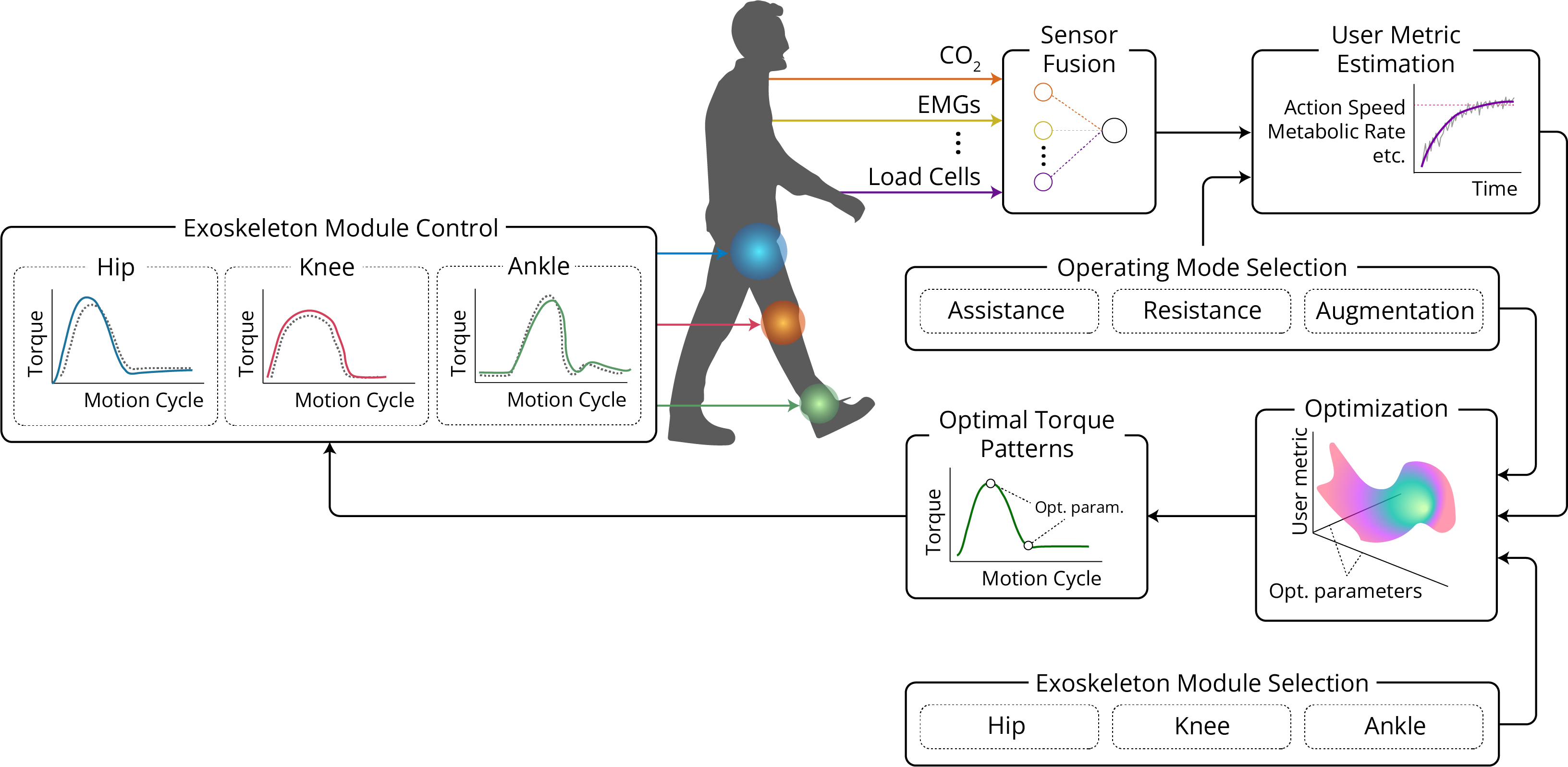
Projektets mål är att bygga en fysisk prototyp av ett modulärt exoskelettsystem för nedre extremiteter med ett digitalt gränssnitt till en realtidsvariabel styrenhet. Prototypen kommer att vara utrustad med off-board aktiveringsmoduler som ger variabel kontroll till olika leder och leders rörelseområden samtidigt som den kan stödja realtidskontroll av dess kinetiska egenskaper. Genom att variera hjälpstrategierna i exoskelettsystemet via ett digitalt gränssnitt kommer vi att möjliggöra human-in-the-loop (HILO) optimering för att hitta optimala styrstrategier för olika användare och olika mål.
Bakgrund
Personer med fysiska funktionsnedsättningar är den största minoritetsgruppen i världen, och globala trender i åldrande befolkningar indikerar en förväntad ökning av befolkningen som påverkas av funktionshinder. I Sverige är muskel- och skelettbesvär en av de vanligaste orsakerna till långvarig funktionsnedsättning. Bärbara robothjälpande exoskelett har genomgått en snabb utveckling under de senaste decennierna, men ändå används bara en handfull produkter ofta, antingen inom eller utanför forskningsmiljöer. En viktig anledning till detta är att en enhet måste anpassas för användarens följsamhet och effektivitet för optimal effekt och komfort. Att använda metoder för att automatiskt upptäcka, anpassa och kontinuerligt anpassa assistans kan övervinna dessa utmaningar, vilket gör att exoskelett och proteser kan uppnå sin potential.
Tvärvetenskapligt samarbete
Forskarna i teamet representerar KTH School of Engineering Science, Institutionen för teknisk mekanik, och KTH School of Industrial Engineering and Management, Institutionen för Engineering Design.
Hållbarhetsmål
Med detta projekt syftar vi till att förbättra hälsa och välbefinnande för alla kön, minska ojämlikheter och deltagande av marginaliserade befolkningar (FNs hållbara utvecklingsmål 3, 5, 10).

Grundad av
Digital Futures
Projektets längd
2022-2024
Contact
