Come and see what our Teams have been up to since March.
All are most welcome to come and see the prototypes from this year's Mechatronics Advanced course! Join us in K1 for the Presentations from kl.13-14.30, then come up to the Department of Engineering Design and see the Demos of the prototypes in action (LabHallen, kl.15-17).
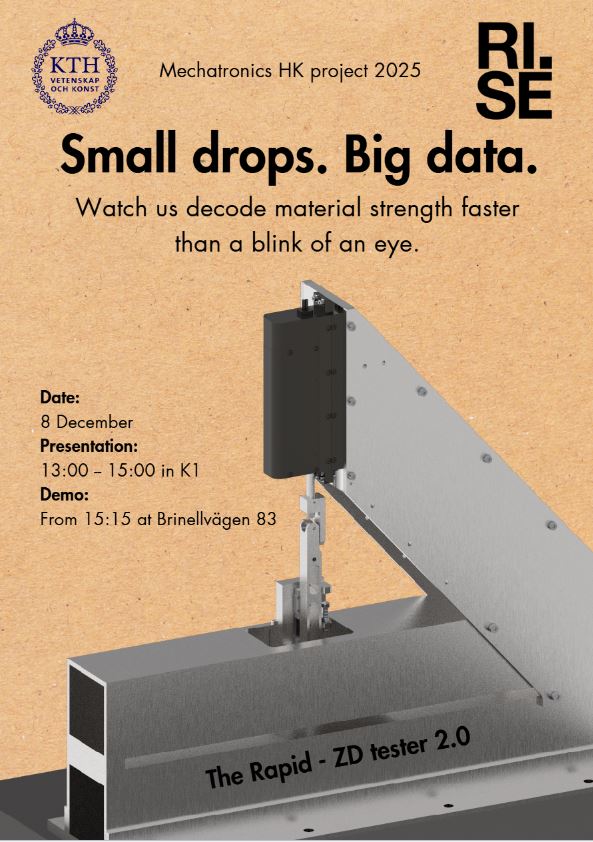
The Rapid-ZD tester 2.0 is a second generation high rate testing machine developed for RISE that can emulate high speed, low pressure deformation and sample it with incredible precision at MHz rates.
As the paper packaging industry advances into new materials, and the material demands increase, the need for more and detailed property data is essential to understand what it takes to achieve high‑quality printing at industrial speeds. Our project in the HK-Capstone Course collaborates with RISE to tackle this challenge.
At our live demo, you can peek into the sub-micron world to learn about the small things that support the transition to more sustainable packaging.
Wildfires are becoming more frequent as climate change intensifies. Precise knowledge about the local ignition risk is an important factor when it comes to wildfire prevention. Today, the risk of wildfire is determined by historical data and testing by experts out in the field. Thus, the assessment is not based on standardized parameters.
This project aims at creating a standardized way to determine the risk of fire in a local area directly in the field. This is done by burning a standard-sized sample of the forest floor. The ignition time and the rate of spread can then be measured using a thermal camera. By doing so, it is possible to determine the risk of fire in an area and get an instant result.
We welcome you to visit us during our demonstration to find out more about IdentiFIRE. Let’s put fright to the ignite!
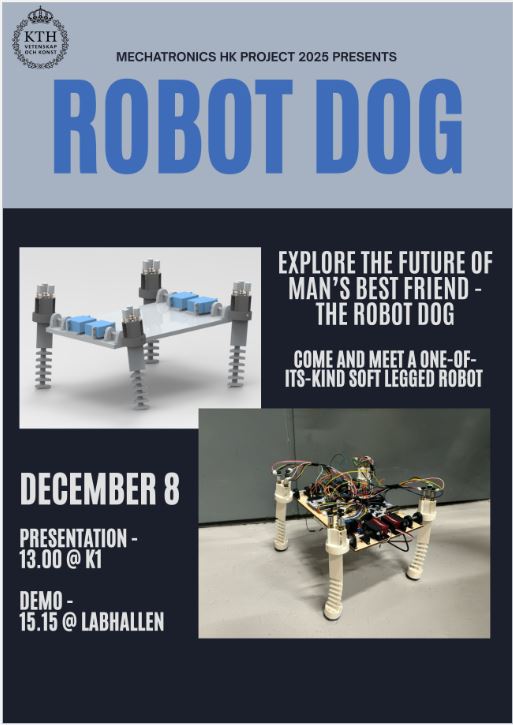
Robots are now more than ever part of our everyday lives. With this increasing popularity, new fields are explored, such as soft robotics. Instead of relying on rigid structures and heavy joints, soft robots use flexible materials that can bend and stretch. This not only makes them safer and more suitable for close interaction with humans but also allows them to handle unpredictable environments and achieve movements that traditional robots cannot.
You are invited to discover our soft robot dog, a four-legged prototype that showcases the potential of this technology. Unlike conventional robotic dogs, this one moves using soft, deformable legs actuated by twisted wires that contract and relax. The results in a compliant robot capable of smooth steps.
The Awesome String Winding Machine is a semi-automatic machine developed to improve the precision and repeatability of string manufacturing for violin, viola, cello and nyckelharpa. The project combines mechanics, electronics, pneumatics and control systems with a focus on measuring and controlling the tension in the string during manufacturing.
During the Grand Finale, we will demonstrate how the ASWM can measure and control tension at up to 15,000 RPM, while an operator controls certain aspects of the process. Visitors will see how the load cell sensor is used in a closed-loop control system, and how the HMI provides real-time feedback on the tension.
We will also demonstrate subsystem integration between servo motors, linear rails, force sensor, pneumatic support arms and the winding module tower etc and their interaction during the sequence used in string manufacturing. The goal is to provide a clear picture of what string manufacturing for instruments can look like: a combination of human control and mechatronics.
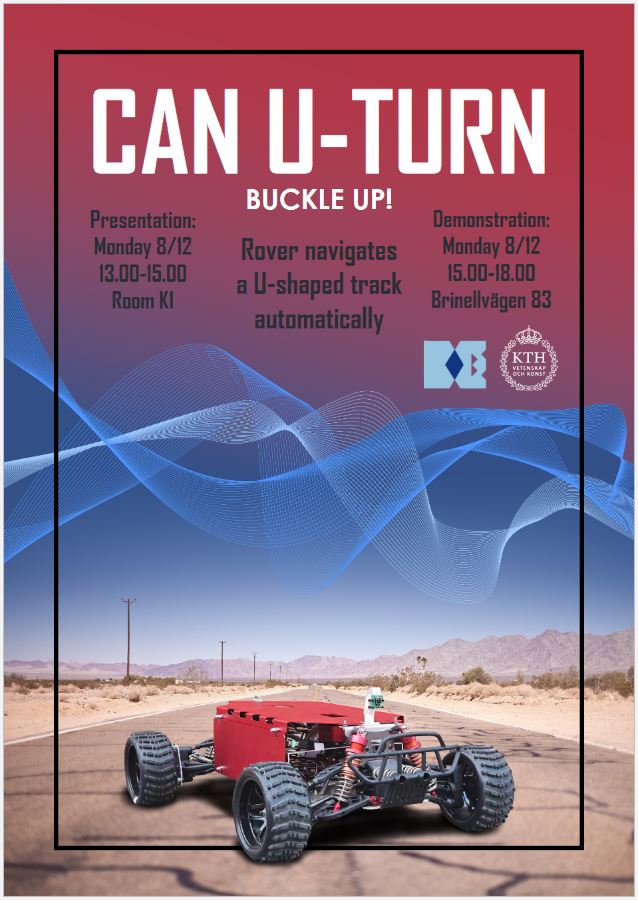
Our project presents an autonomous driving rover capable of performing a complete U-turn maneuver without human input. The goal is to demonstrate the rover’s ability to perceive its environment, localize itself, and control its motion accurately along a U-shaped track.
The system integrates data from multiple sensors, an onboard camera, IMU, and wheel feedback, to estimate the rover’s position and orientation in real time. This information is used to continuously adjust steering and speed, allowing the vehicle to follow the planned U-shaped path smoothly and recover from small disturbances or drift.
During the Grand Finale Demo, visitors will see a video demonstration of the rover completing the U-shaped course. Because the full track spans approximately 44 by 12 meters, the maneuver is shown through recorded footage that captures the rover’s autonomous navigation from start to finish. The video highlights the core principles of autonomous navigation, including sensor fusion, localization, and control, in a compact and practical platform that mirrors the challenges of full-scale self-driving vehicles.
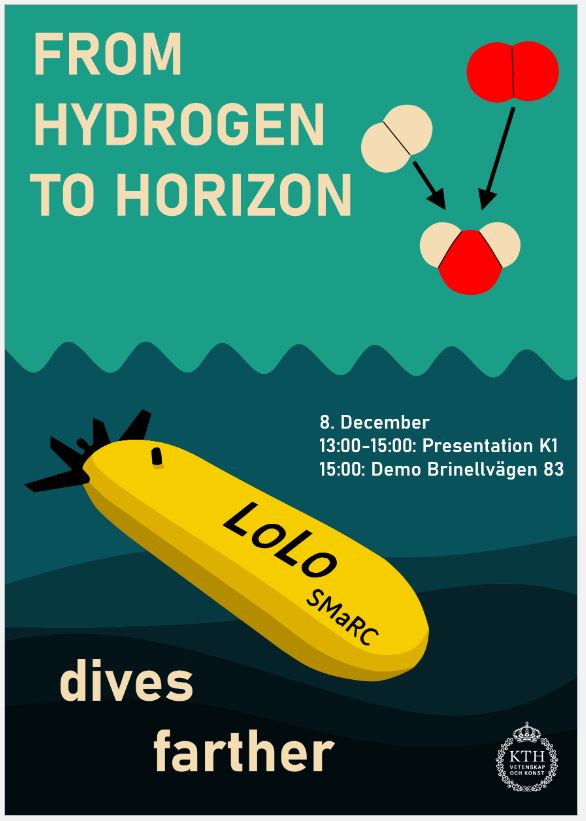
Autonomous Underwater Vehicles are transforming marine operations from environmental monitoring or underwater infrastructure inspection to safeguarding society. Meet LoLo, the autonomous underwater explorer developed at the Swedish Maritime Robotics Centre (SMaRC). LoLo is a versatile research platform that has already been to the Arctic, explored the glaciers of northern Greenland and collected valuable data under challenging conditions.
Originally, LoLo’s energy storage design limited its mission range and operational capabilities. Our objective was to extend mission duration while simultaneously minimizing environmental impact. To achieve this, we upgraded LoLo’s energy system by combining a fuel cell system with battery storage. Additionally, we optimized energy usage within space and environmental constraints.
With these improvements, LoLo is ready to return to the waters pushing the boundaries of underwater exploration. On future missions LoLo will now be capable of diving even deeper and farther, enabling researchers to study and understand marine ecosystems further.
Join us at our demo where we will demonstrate the capabilities of hybrid energy storage systems in an autonomous submarine.
Join us and explore the BlueROV2, an autonomous underwater vehicle, and our approach to navigating the unknown. By utilizing SLAM (Simultaneous Localization and Mapping), the ROV estimates a local position and creates
a point cloud map without using GPS. This map is then used to refine the position estimate, creating a more robust and accurate navigation system.
To further utilize the point cloud and position, we developed a collection system in the form of a gripper that allows objects to be retrieved during missions.
If you’ve ever wondered how one can create waterproof systems, now’s your opportunity to find out. Swing by our table and take a look at both the gripper and videos of the BlueROV traversing the seas!
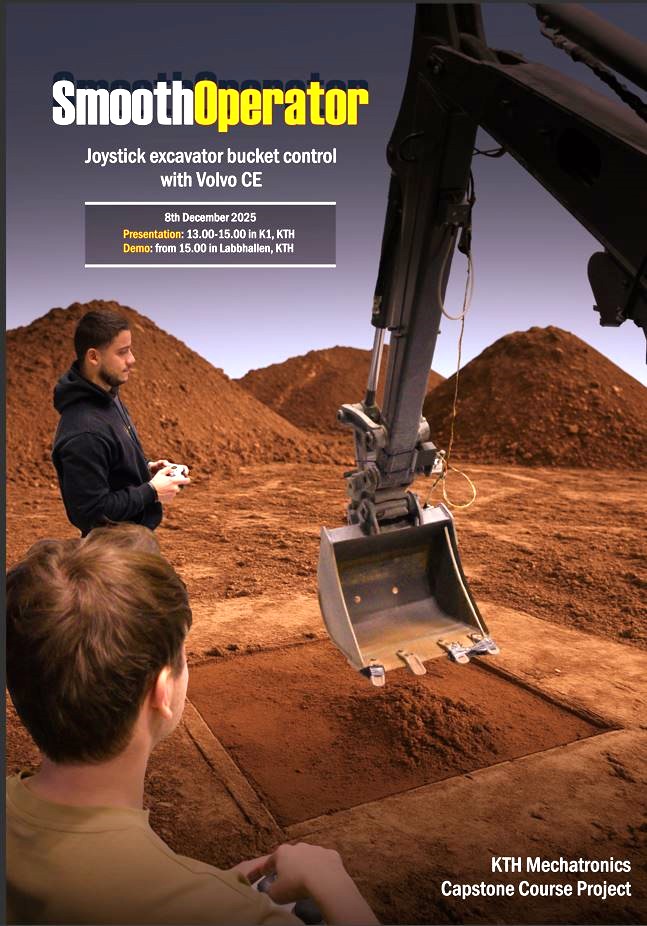
Imagine controlling your excavator’s bucket with the same precision as using a modern game controller. Our project introduces a new way to steer excavators by replacing the two traditional hydraulic levers in the cab with a handheld controller that directly manages the bucket’s position.
Why does this matter? Traditional hydraulic control requires experience, especially when operating the bucket smoothly or in a straight line. For an unseasoned operator, even basic motions can feel challenging. Using our position-based control system, the operator simply moves the controller in the desired direction. The excavator then follows automatically, calculating the necessary hydraulic movements to achieve the intended motion.
We believe this approach represents the future of excavator operation: intuitive and accessible for everyone.