

3D-Scanner
Skanning av mindre föremål samt återskapandet av dem visuellt som ett nät i en dator
Projektbeskrivning
Syftet med detta projekt var att konstruera en 3D-scanner kapabel att scanna mindre objekt och visualisera dem i en dator med tillfredsställande resultat. Målet var sedan att generera en STL-fil som går att skriva ut i 3D-skrivare för att försöka använda sig av reverse engineering. Komponenter, material och verktyg försågs av KTH så gott det gick och en budget på 1000 kr var tillgänglig för att inhandla komponenter som inte fanns på KTH.
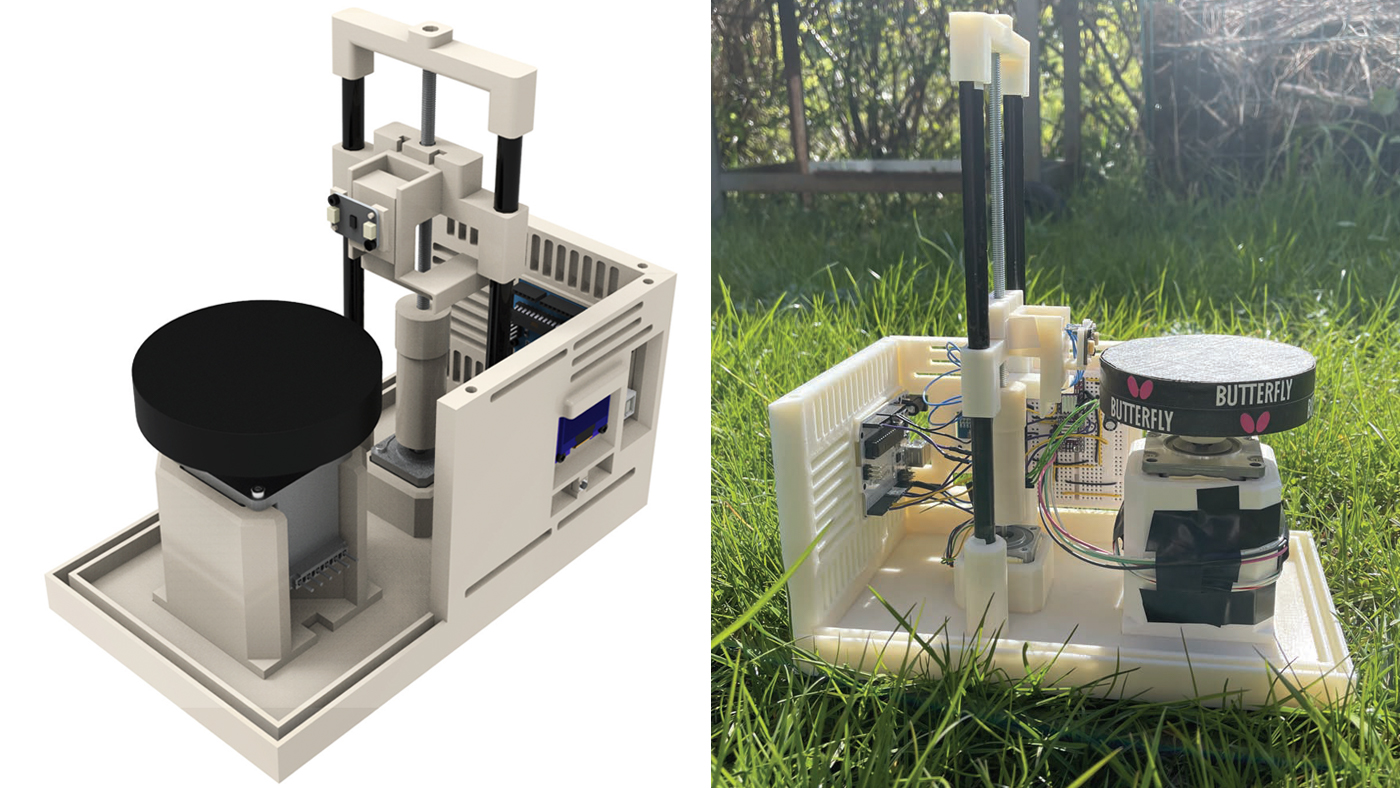
Skannern designades med hjälp av Solid Edge och använder sig av två stegmotorer för att skanna object. En motor användes för att rotera den plattform som objektet placerades på och den andra stegmotorn användes för att flytta en hiss varpå en avståndssensor monterades. Genom att hålla koll på hissens höjd i kombination med rotationen av objektet kan avståndet som sensorn uppmäter konverteras till en punkt i det kartesiska koordinatsystemet.
Ett flertal metoder testades för att undersöka hur resultaten varierade. För det första ökades densiteten av skannade punkter, det vill säga sensorn returnerade värden oftare än stegmotorn roterade. För det andra genomfördes ett flertal mätningar för varje enskild punkt för att bestämma ett medelavstånd och på så sätt minimera brus och osäkerhet. Att placera en enstaka lasersensor vinkelrätt mot objektroterande plattan visade sig vara det optimala arrangemanget för noggrannhet med den begränsade budgeten för det här projektet. Inskanningarna är väldigt tidskrävande vilket gör det viktigt att bestämma sig för att prioritera snabbhet eller noggrannhet.
Poster
3D Scanner poster (Eng) (pdf 904 kB)
Rapport
3D Scanner report (Eng) (pdf 1,5 MB)
MF 133X, Grupp 21
Carl Egenäs,
Axel Sacilotto