

Gobi
Automatiserad sandspridare för snö
Projektbeskrivning
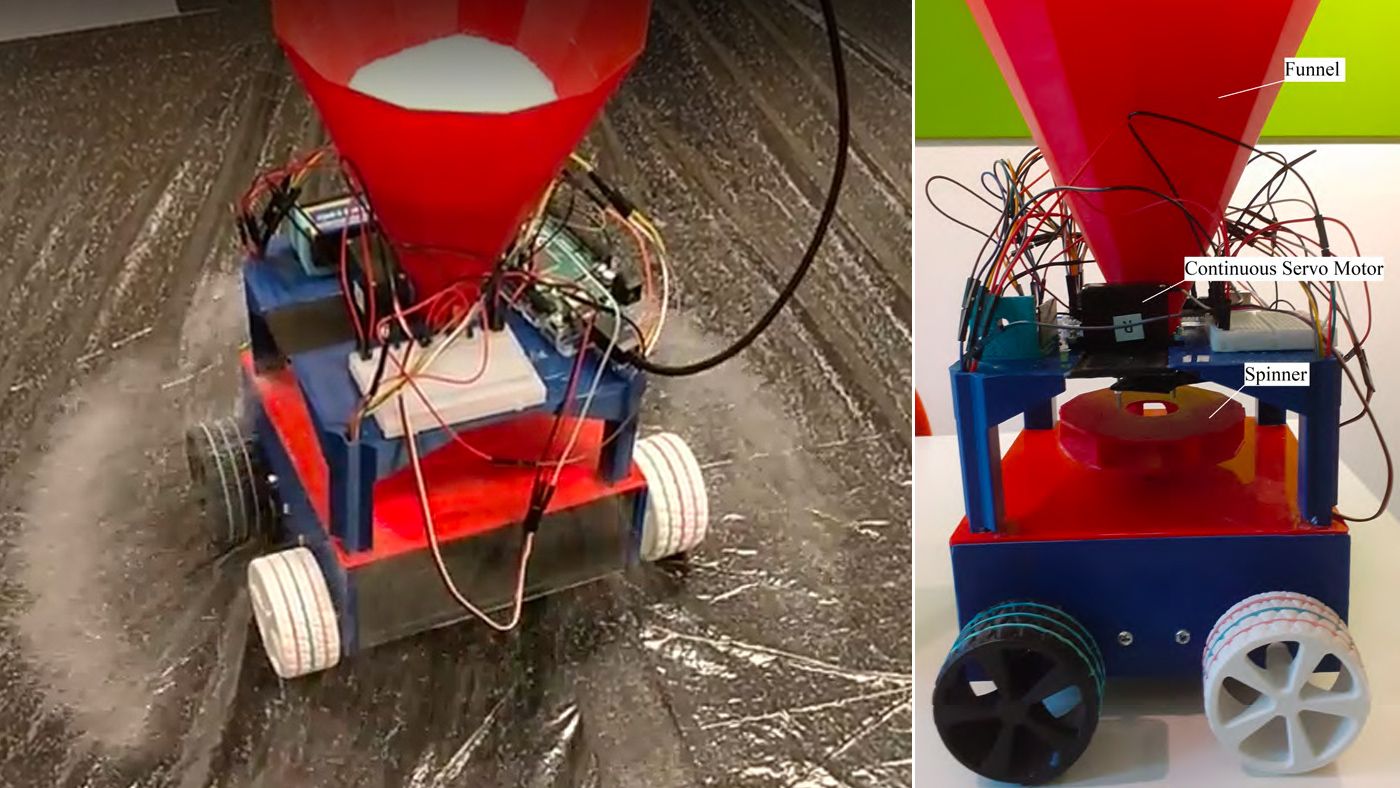
Syftet med denna rapport var att genom konstruktionen av en prototyp undersöka de tekniska utmaningarna för att skapa en robot som distribuerar sand på uteplatser efter snöfall. En robot som kan slutföra denna uppgift bör kunna känna till sin position i en okänd terräng och färdas på den på ett förutsägbart sätt som möjliggör en jämn spridning av sanden. För att uppnå stabilitet och förutsägbarhet för rörelse valdes stegmotordrivna hjul som styrmetod. Sandspridningsmekanismen består av en likströmsmotor ansluten till en 3D-utskriven skiva med rektangulära extruderingar vid basen. Robotens hjul och chassi var också 3D-utskrivna. Slutligen var ett Arduino MEGA-kort den valfria styrenheten.
Poster
Gobi poster (Eng) (pdf 1,0 MB)
Rapport
Gobi report (Eng) (pdf 1,2 MB)
MF 133X, Grupp 10
Tim Naser
Stavros Ntouvas