

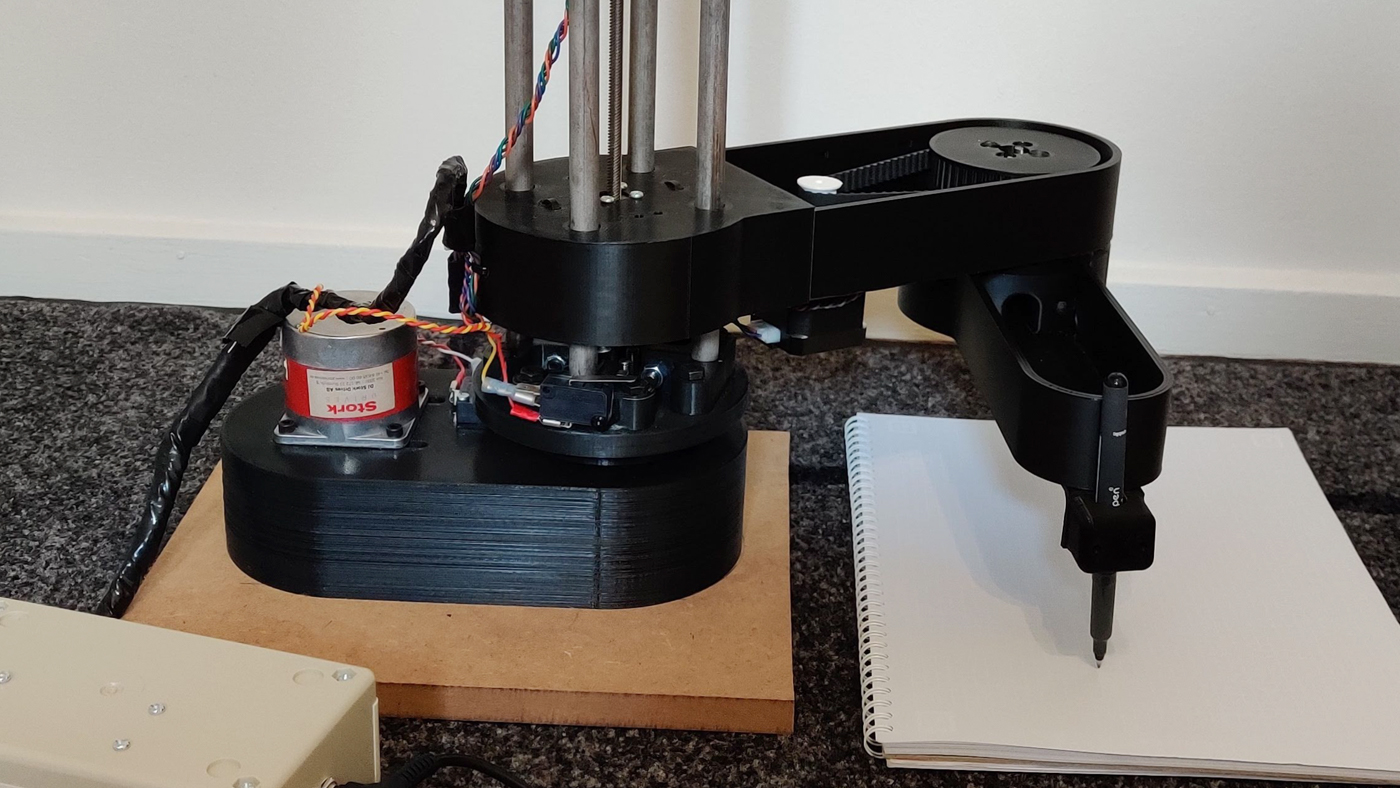
Picassos arm
En ritande SCARA-robot
Projektbeskrivning
En SCARA-robot som ritar kräver en hög noggrannhet och precision. Syftet med detta projekt är att skapa en robotarm som kan rita bilder som generas av en användare i ett ritprogram, armens rörelse beräknas med hjälp av invers kinematik. Projektet undersöker hur precisionssäker roboten är samt dennes snabbhet. Under projektets gång har upprepade tester gjorts för att mäta dessa egenskaper.
Roboten uppnådde en hög grad av noggrannhet när den gjorde punkter på samma ställe upprepade gånger, men den har svårt att med hög precision återskapa bildens korrekta geometri, detta visas med ett test då den skall rita en cirkel. Detta kan bero på flera olika faktorer. Det mest sannolika är att det finns glapp i armarnas kuggremsdrift, när roboten gör en cirkulär rörelse så uppkommer felet när någon av armarna byter rörelseriktning. I rapporten redogörs hur roboten har konstruerats och programmerats.
Poster
Picassos arm poster (Eng) (pdf 1,8 MB)
Rapport
Picassos arm report (Eng) (pdf 1,7 MB)
MF 133X, Grupp 04
Ibrahim Baydono
Johan Hultenheim