
New lab trains space robots in weightless environments
At a newly opened lab at KTH, space robots are training to navigate in weightless environments. The lab, one of the biggest of its kind in Europe, was built by the WASP NEST-project DISCOWER.
The goal? To develop software and hardware for autonomous robots capable of navigating independently in weightless environments, such as space and underwater.
“I've long believed that underwater and space robotics share a common challenge: unconventional gravitational conditions. Buoyancy in water and weightlessness in space present similar hurdles.
Testing autonomous systems, where robots move independently without direct human control, in these environments is difficult or impossible”, says Dimos Dimarogonas, professor in automatic control at KTH.
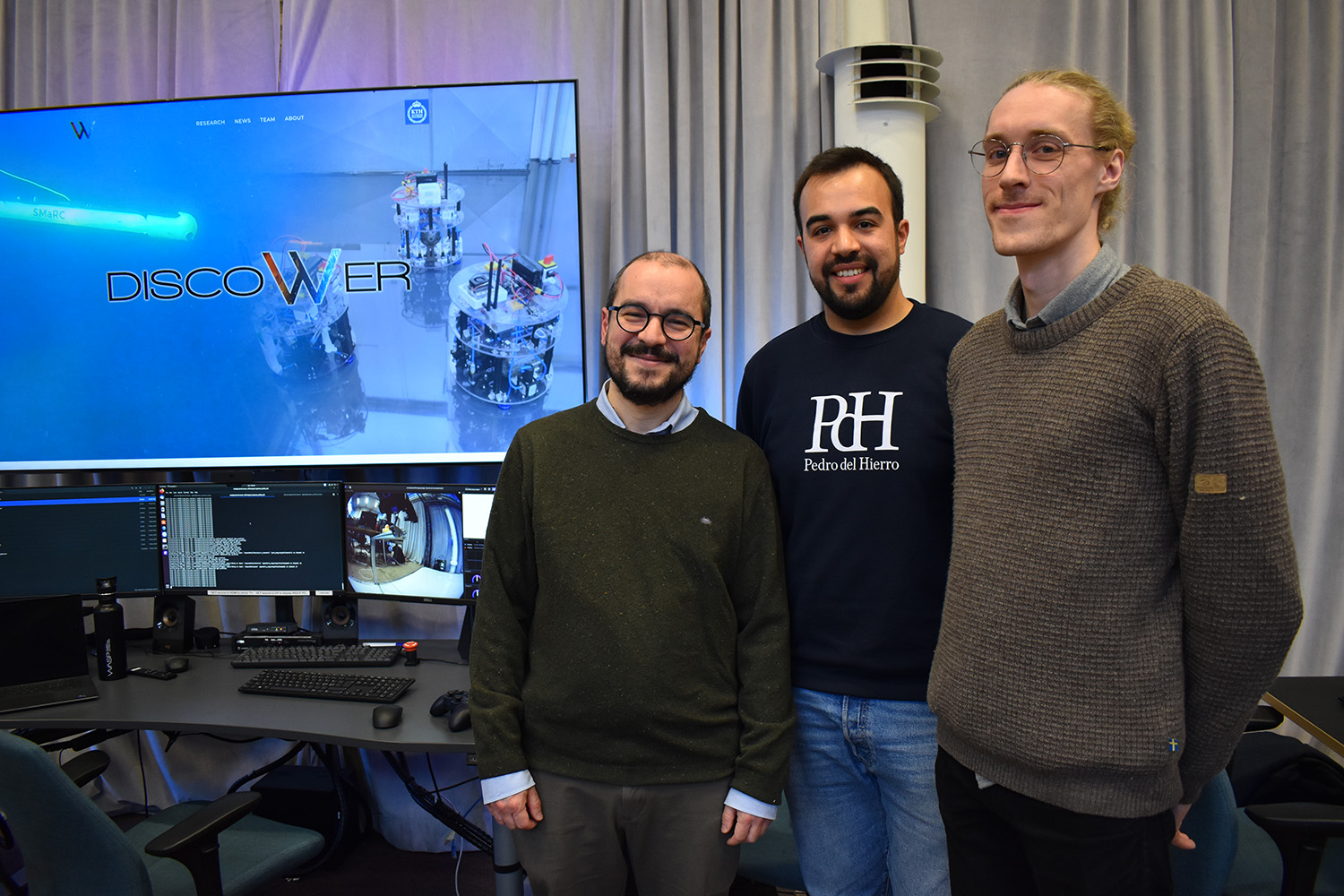
The challenge of testing means that there has previously been limited research on multi-robot systems operating autonomously in weightless environments, Pedro Roque, PhD student in the project, explains. In fact, the DISCOWER lab is one of the first of its kind in Europe, Pedro Roque continues, that directly looks at the combination of the two environments:
“With this new laboratory within our project, we can help bridge the research gap. We have constructed a two-dimensional simulation of space to address multi-robot systems research. Here, we can train both software and hardware for autonomous multi-robot systems in an environment that closely resembles space, and later, integrate them with underwater facilities that will be built in the same area.”
Slippery floor for the spacebots
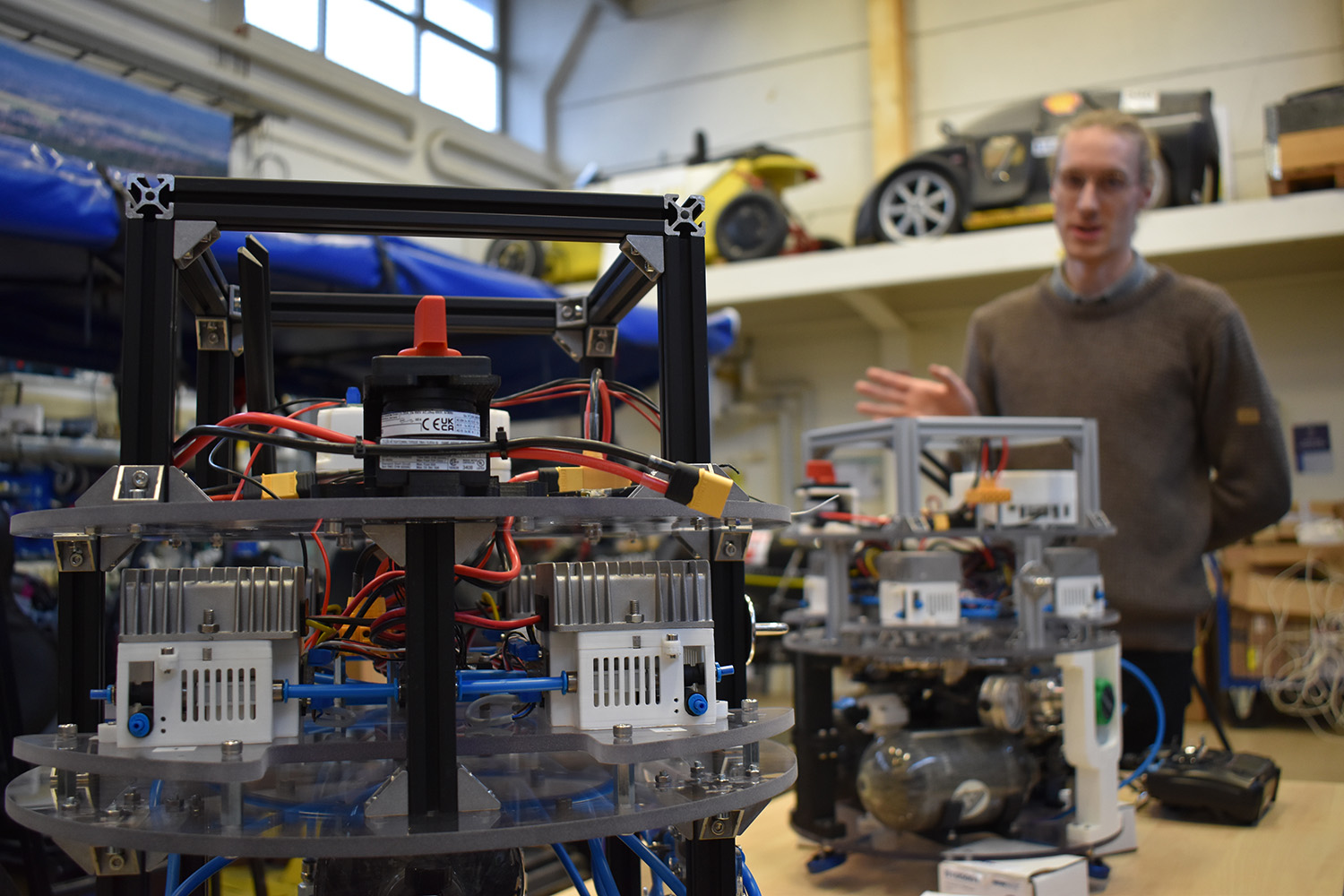
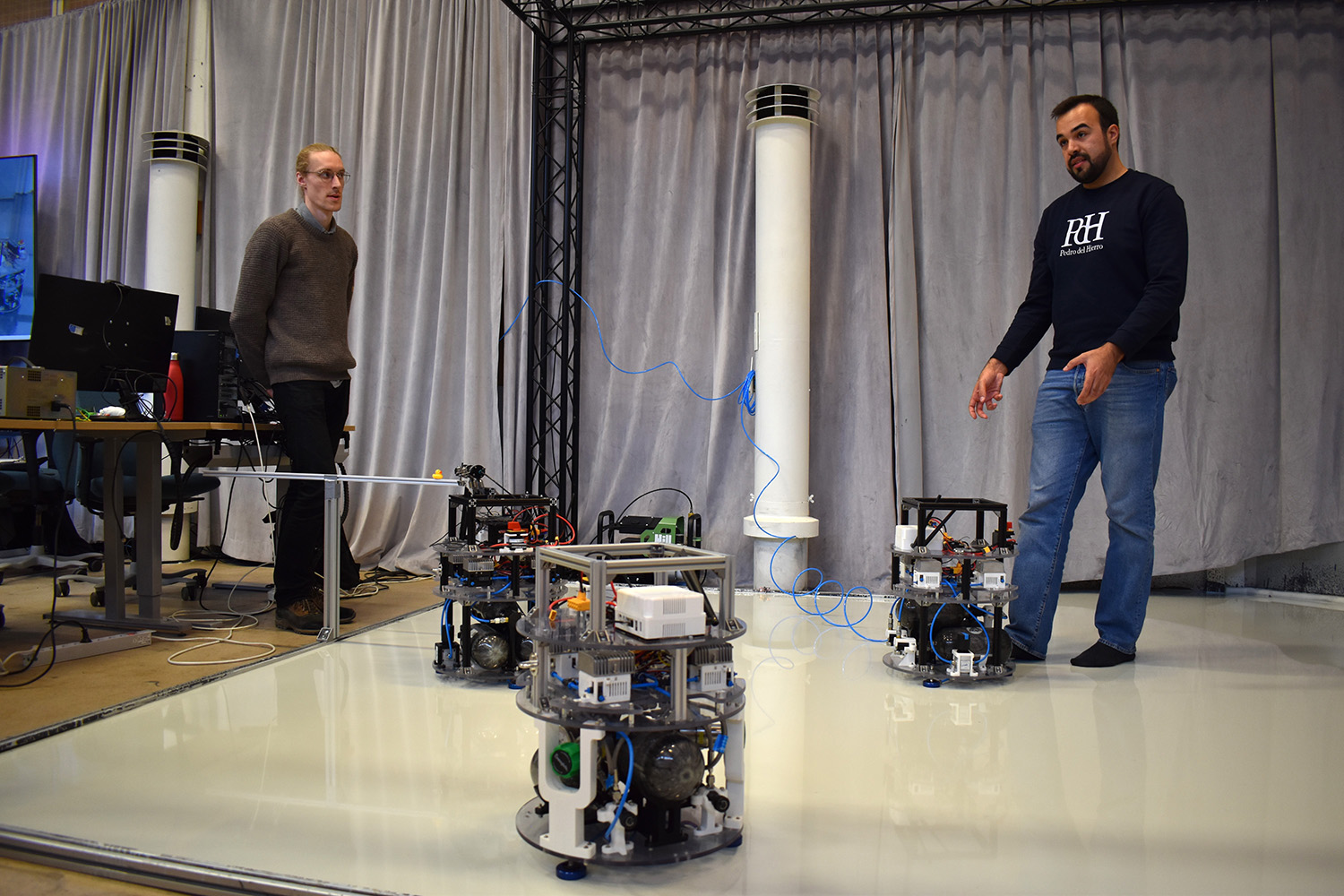
The project team, along with master students, have built three small robots that they are calling spacebots, robots generally termed free-flyers. The lab has three main components to create a weightless-like environment for the spacebots. The first is the epoxy floor, which must be as smooth and level as possible so the three spacebots can move without friction (via levitation) and imitate microgravity motions.
The second component consists of support systems, mainly the motion capture system made by Qualisys, consisting of six cameras providing ground truth to the robots and compressors that allow for the uninterrupted operation of space robots. The third and final are the platforms:
“The compressed air thrusters mimic the thrusters you would see on a spacecraft: by releasing puffs of air in one direction, they make the spacebots move in another direction. On a spacecraft, they would not use compressed air but some other system, but that is not something we can use in this lab because it would be unsafe”, said Pedro Roque.
“Right now, the spacebots are controlled remotely by the research team, but the goal of the project is to have all three of them moving around together autonomously in harmony”, said Elias Krantz, PhD student in the project.
“Our focus is on finding effective arguments for both environments – space and underwater. Additionally, we are enhancing hardware and facilities to a point where we can begin testing algorithms. This is our current status”, said Dimos Dimarogonas.
The underwater environments, where the robots would act in reality later on, would they be on Earth?
“For now, yes. But Earth is not the only underwater environment that space engineering is aiming for. Right now, we need to test on Earth, but being research, we will see where we can apply it”, Pedro Roque concludes.
Photo and video credits: Nelly Sahlstrand, Linköping University
Text: Leila Zoubir, KTH