
Nytt labb tränar rymdrobotar i tyngdlösa miljöer
I ett nyöppnat labb på KTH tränar rymdrobotar på att navigera i tyngdlösa miljöer. Labbet, som är ett av de största i sitt slag i Europa, byggdes av WASP NEST-projektet DISCOWER.
Målet? Att utveckla mjuk- och hårdvara för autonoma robotar som ska kunna navigera självständigt i tyngdlösa miljöer, som rymden och under vattnet.
– Jag har länge sett det som att undervattens- och rymdrobotik delar en gemensam utmaning: okonventionella gravitationsförhållanden. Flytkraften i vatten och tyngdlösheten i rymden utgör liknande hinder.
Att testa autonoma system, där robotar rör sig självständigt utan direkt mänsklig kontroll, i de här miljöerna är svårt eller omöjligt, säger Dimos Dimarogonas, professor i reglerteknik vid KTH.
Utmaningen med att testa gör att det tidigare har funnits begränsad forskning om multirobotsystem som arbetar autonomt i tyngdlösa miljöer, förklarar Pedro Roque, doktorand i projektet. Faktum är att DISCOWER-labbet är ett av de första i sitt slag i Europa som direkt undersöker kombinationen av de två miljöerna:
– Med det här nya laboratoriet kan vi hjälpa till att överbrygga forskningsgapet. Vi har konstruerat en tvådimensionell simulering av rymden just för att forska på flerrobotsystem. Här kan vi träna autonoma multirobotsystem i en miljö som liknar rymden. Senare kan vi integrera dem med undervattensanläggningar som kommer att byggas i samma laboratorium.
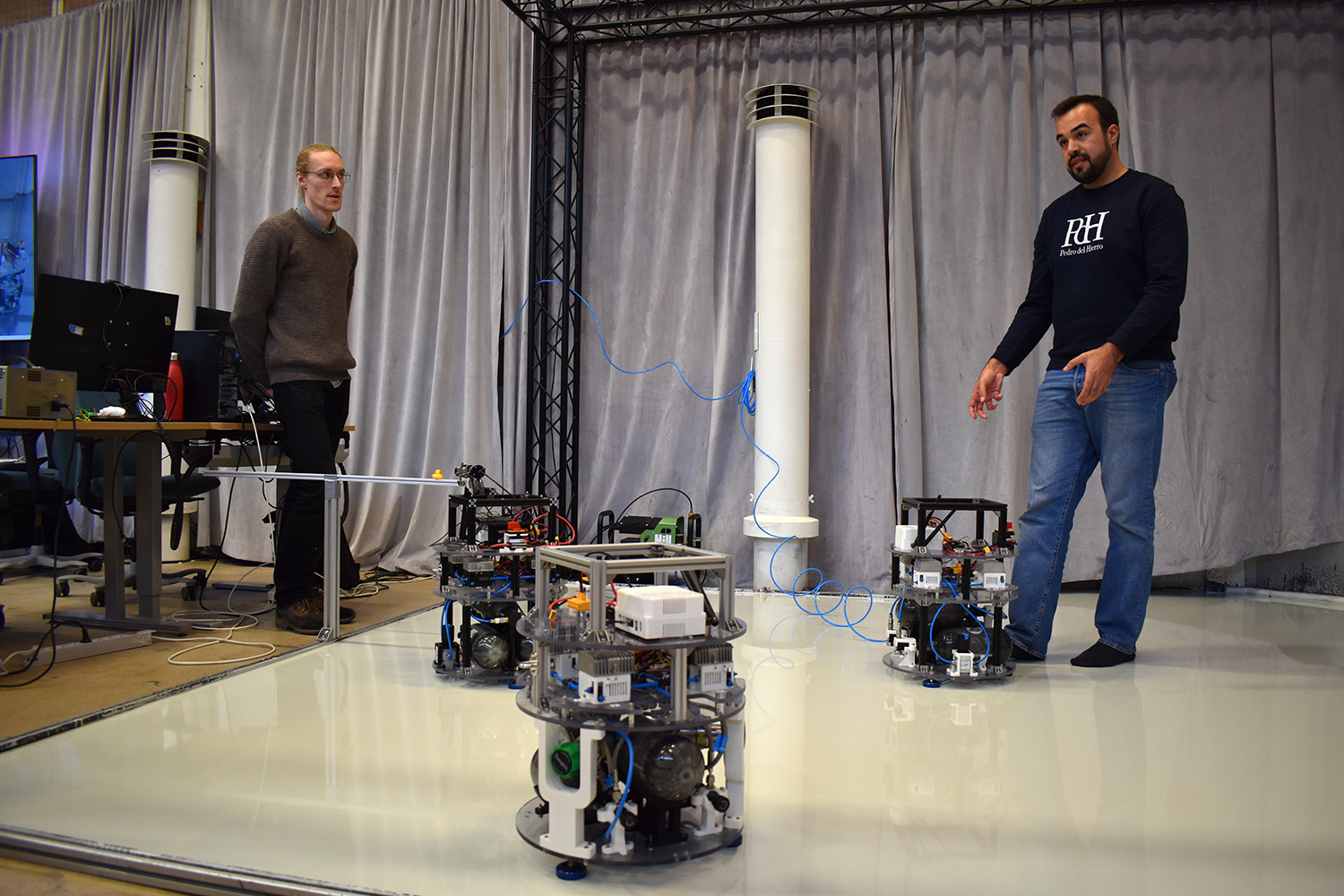
Halt golv för rymdrobotarna
Projektgruppen har tillsammans med masterstudenter byggt tre små robotar som de kallar spacebots, robotar som annars brukar kallas “free-flyers”. Med hjälp av tre huvudkomponenter skapas en viktlösliknande miljö för rymdrobotarna i labbet. Den första komponenten är epoxi-golvet, som måste vara så slätt och plant som möjligt så att de tre rymdrobotarna kan röra sig friktionsfritt (via levitation) och imitera mikrogravitationsrörelser. Den andra komponenten består av stödsystem, främst det så kallade motion capture-systemet tillverkat av Qualisys, bestående av sex kameror som ger så kallad ”ground truth”, referensdata, till robotarna, samt kompressorer som möjliggör oavbruten drift av rymdrobotar. Den tredje och sista är plattformarna:
– Drivsystemen av komprimerad tryckluft imiterar de manövreringssystem som finns på en rymdfarkost: genom att släppa ut luftpuffar i en riktning får de rymdrobotarna att röra sig i en annan riktning. På en rymdfarkost skulle de inte använda tryckluft utan något annat system, men det är inget vi kan använda i det här labbet eftersom det skulle vara osäkert, säger Pedro Roque.
– Just nu fjärrstyrs rymdrobotarna av forskargruppen, men målet med projektet är att alla tre ska röra sig tillsammans autonomt i harmoni, säger Elias Krantz, doktorand i projektet.
– Vårt fokus ligger på att hitta välgrundade argument för båda miljöerna – rymden och under vattnet. Dessutom förbättrar vi hårdvara och anläggningar så att vi därefter kan börja testa algoritmer. Där är vi just nu i projektet, säger Dimos Dimarogonas.
Undervattensmiljöerna där robotarna ska röra sig och interagera i verkligheten senare, kommer de vara på jorden?
– För tillfället, ja. Men jorden är inte den enda undervattensmiljön som rymdteknikforskning siktar på. Just nu behöver vi testa på jorden, men som med all forskning: med tiden får vi se var vi kan tillämpa den, avslutar Pedro Roque.
Foto och film: Nelly Sahlstrand, Linköpings universitet
Text: Leila Zoubir