Our current projects range from exoskeleton technologies that adapt in real time to users, to soft robotic modules for safe social interaction, and mobility solutions for aging populations. Each initiative reflects our mission to translate fundamental mechatronic innovation into robots that improve quality of life, enhance safety, and address real-life challenges.
We design robots with modular architectures that combine soft and rigid elements, ensuring adaptability to diverse tasks, ease of maintenance, and safety by design in human–robot interaction. This modularity supports reliable operation and future-proof upgrades.
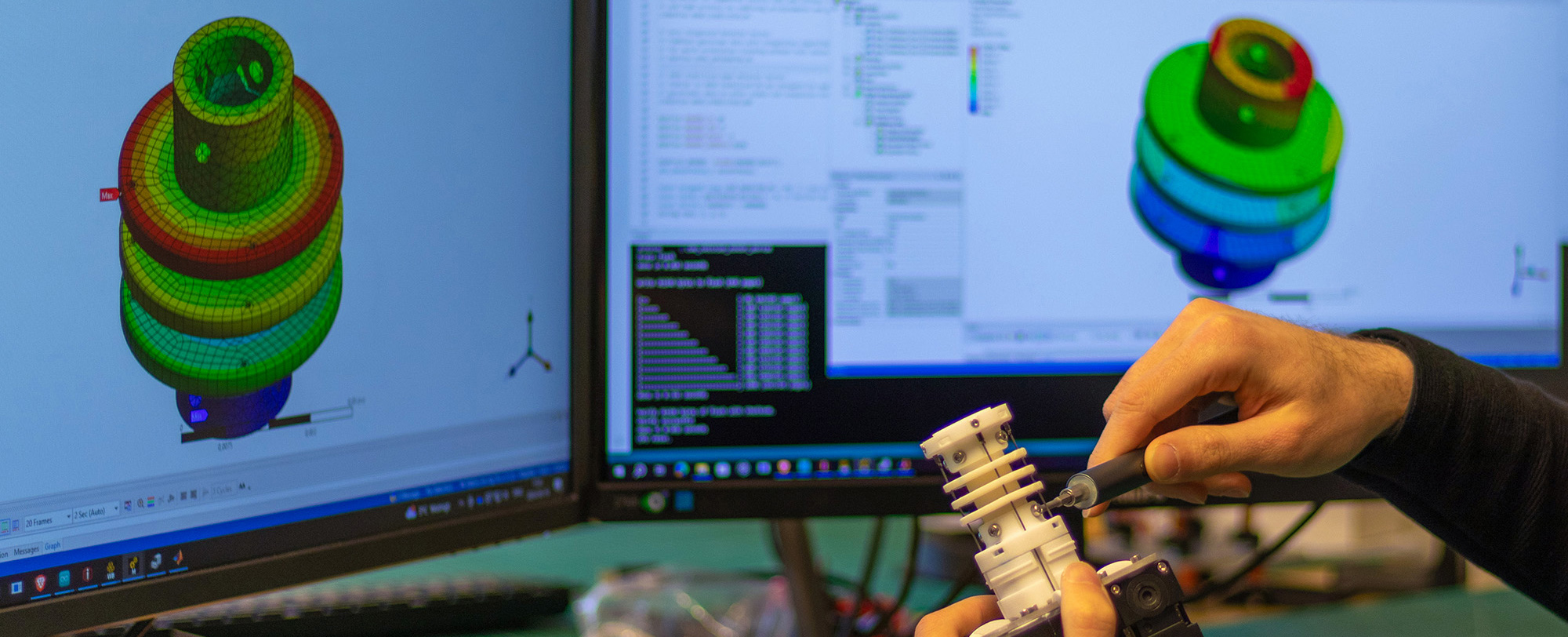
By embedding intelligent materials and advanced sensing technologies into robotic structures, we create systems with bodily awareness that are capable of detecting, diagnosing, and predicting faults. This enhances reliability, resilience, and safety, minimizing downtime while enabling more trustworthy soft robotic platforms.
Our motion control research develops algorithms that deliver responsive, adaptive, and reliable robot behaviors. We integrate model-based strategies with AI-driven continual and adaptive learning, enabling robots to adjust online to changing environments while maintaining smooth, efficient, and safe operation.
Our approach is rooted in mechatronics, which by definition integrates mechanics, electronics, and intelligent control from the earliest design stages. We extend this foundation by collaborating closely with users and experts from diverse fields such as design, psychology, healthcare, education, art and industry. These diverse perspectives help us shape robotic systems that are not only technically robust and reliable, but also adaptive to real-world needs, socially meaningful, and safe to use in sensitive environments.
At our lab, innovation begins with people and their needs. We design robotic systems that address societal and industrial needs by supporting independent living, augmenting workers, and maintaining critical infrastructure. Our robotics research reflects a commitment to adaptive AI, safe integration, and reliable soft robotics that improve quality of life and work. Each project prioritizes safety by design, usability, and long-term reliability, ensuring that robots support people effectively and ethically in their daily lives and work.
The HARU project is part of a long-term collaboration led by Honda Research Institute Japan within the
Socially Intelligent Robotics Consortium
, which brings together researchers across design, technology, and interaction to advance socially intelligent robotics. The consortium’s broader ambition is to create robots that not only fit into, but actively enrich, the social contexts where they are deployed: from hospitals and schools to everyday environments. Its goals include building a global network of experts, providing common robotic platforms, creating reproducible datasets and protocols, and promoting cultural and geographic diversity in robotics research. Within this framework, HARU serves as a testbed for exploring long-term social interaction, with a particular focus on children in sensitive settings such as healthcare and education.
Our contribution
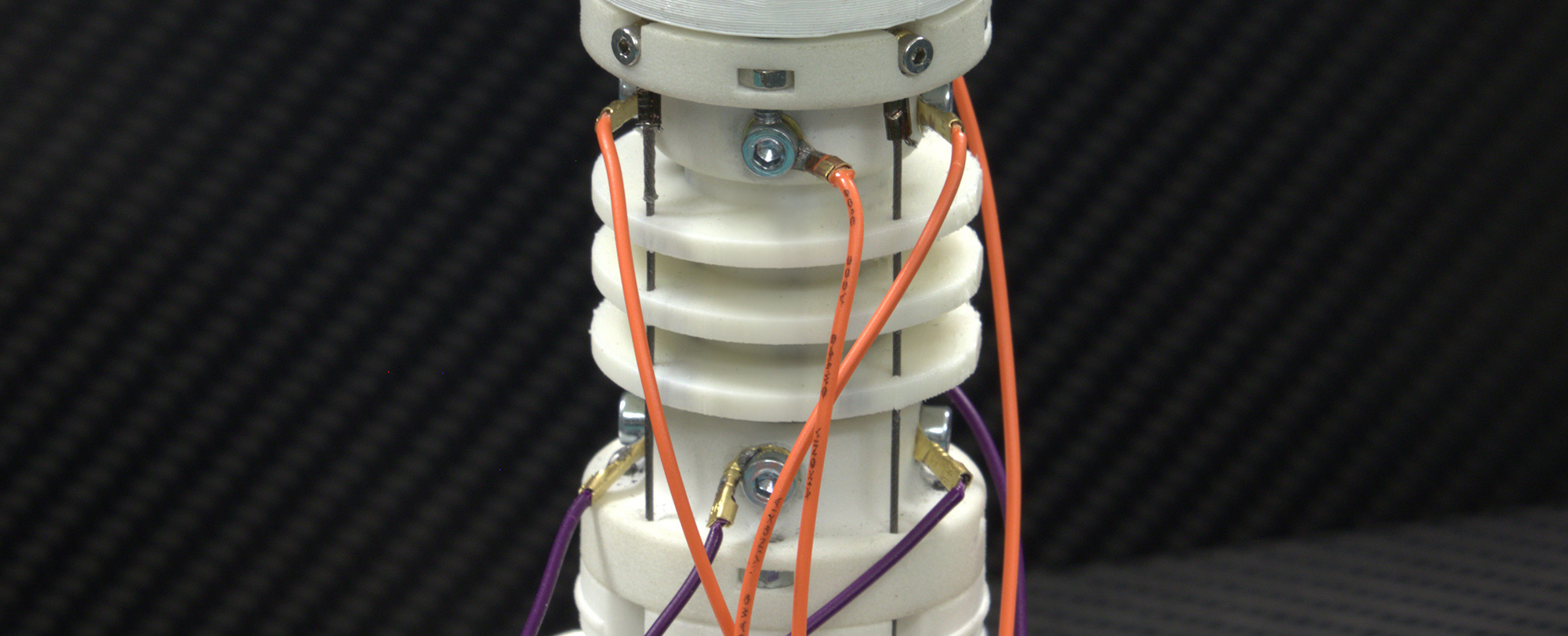
At the Robot Design Lab, our contribution centers on the design and integration of compliant mechatronic systems to ensure HARU’s physical embodiment supports safe, reliable, and expressive interaction. We develop and refine soft robotic elements, embedded actuation and sensing modules, and multi-level control strategies to enable motion that is responsive, trustworthy, and durable over extended use. By focusing on compliance, reliability, and experimental validation, our work ensures that HARU can sustain meaningful engagement in real-world contexts, while contributing to the consortium’s larger mission of advancing inclusive, human-centered, and reproducible social robotics.
In collaboration with the MoveAbility Promobilia Lab and the Media Interaction Group at KTH, the REMA project reimagines exoskeleton design for aging individuals by combining physical functionality with psychological and emotional care. By integrating biomechanical sensing, somatic feedback, and adaptive control systems, this cross-disciplinary work will explore how exoskeletons can dynamically align with users’ physical and emotional states in real-life contexts.
Our contribution
The Robot Design Lab contributes with the design and integration of soft robotic components and all mechatronic systems, including low-level control architectures and actuation layers.
AKI: A Child-Centered Social Robot Platform for Safe Interactions
Project duration
2022 – Ongoing
Funding source
KTH Royal Institute of Technology, Supported by Honda Research Institute of Japan
Description
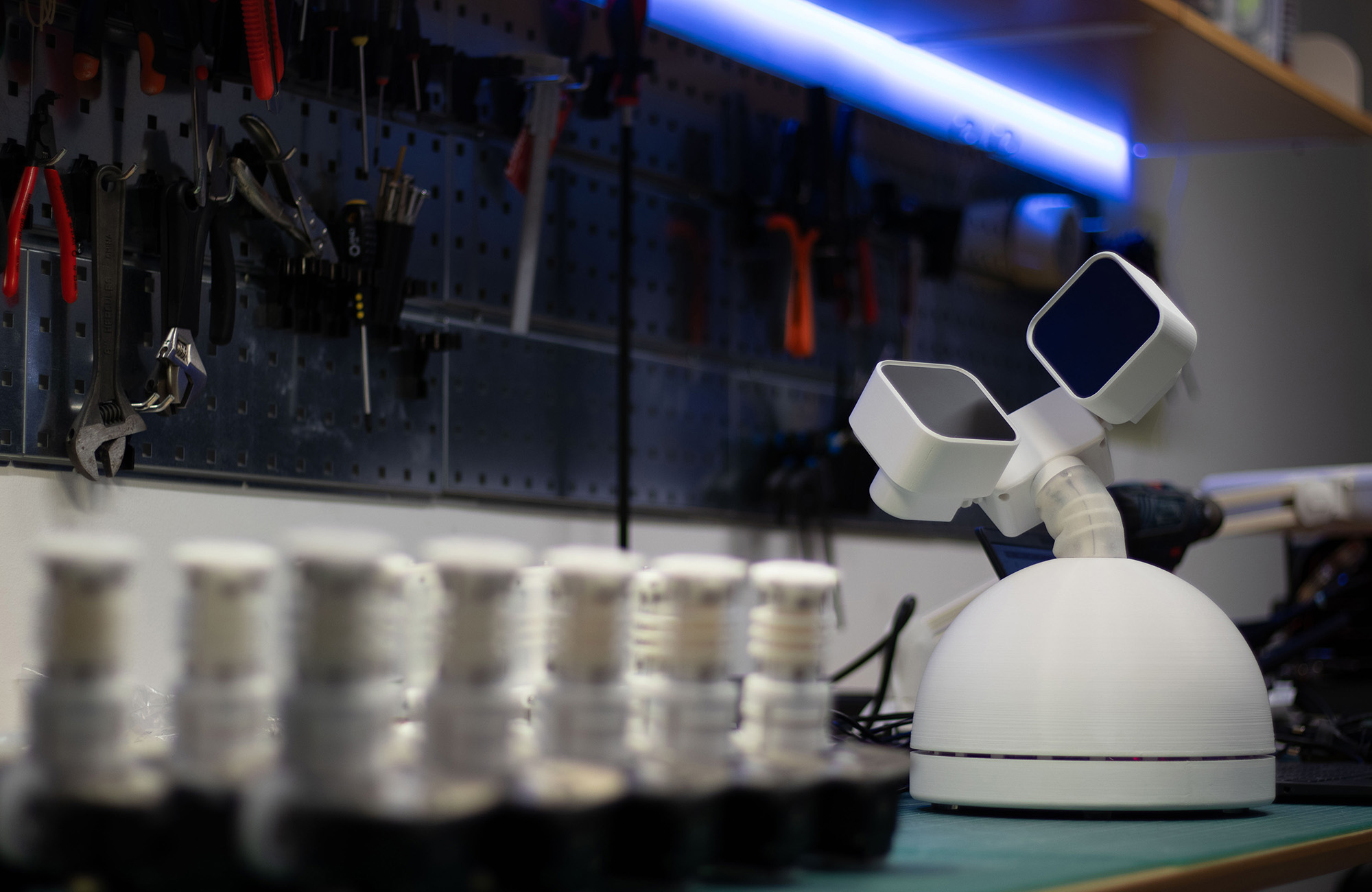
The AKI project was initiated by the Robot Design Lab in 2022 and has since been carried out by MSc students of the Mechatronic Capstone Course (MF2121) and the Degree Project in Mechatronics (MF214X / MF224X). The project provides a platform for the design and development of a tabletop social robot, with a focus on safe, reliable, and engaging interaction with children.
Development follows an iterative mechatronic process combining concept design, mechanical construction, electronics integration, and control software. The first project cycle (2022) translated UNICEF’s AI policy for children into a physical prototype: an egg-shaped robot with 11 degrees of freedom, capable of expressing basic emotions through motion, lighting, and displays. The second project cycle (2024) emphasized reliability, untethered operation, and mobility, leading to a redesign that integrated wheels for enabling autonomous movement.
The project remains ongoing, with current MSc theses focusing on the integration of soft robotics modules. These efforts aim to extend the robot’s expressive and interactive capabilities, while exploring new design solutions for safe and adaptable human–robot interaction.
Our contribution
The Robot Design Lab defines the project framework and ensures continuity across cycles, supporting students in all stages of the mechatronic development process: from concept generation and CAD modeling, to prototyping, testing, and iterative redesign. Contributions include the creation of the robot's electromechanical systems, the integration of sensors, actuators, and control architectures, and the enhancement of reliability and autonomy. Current research investigates soft robotic components, positioning AKI as an evolving platform for innovative social robot design.
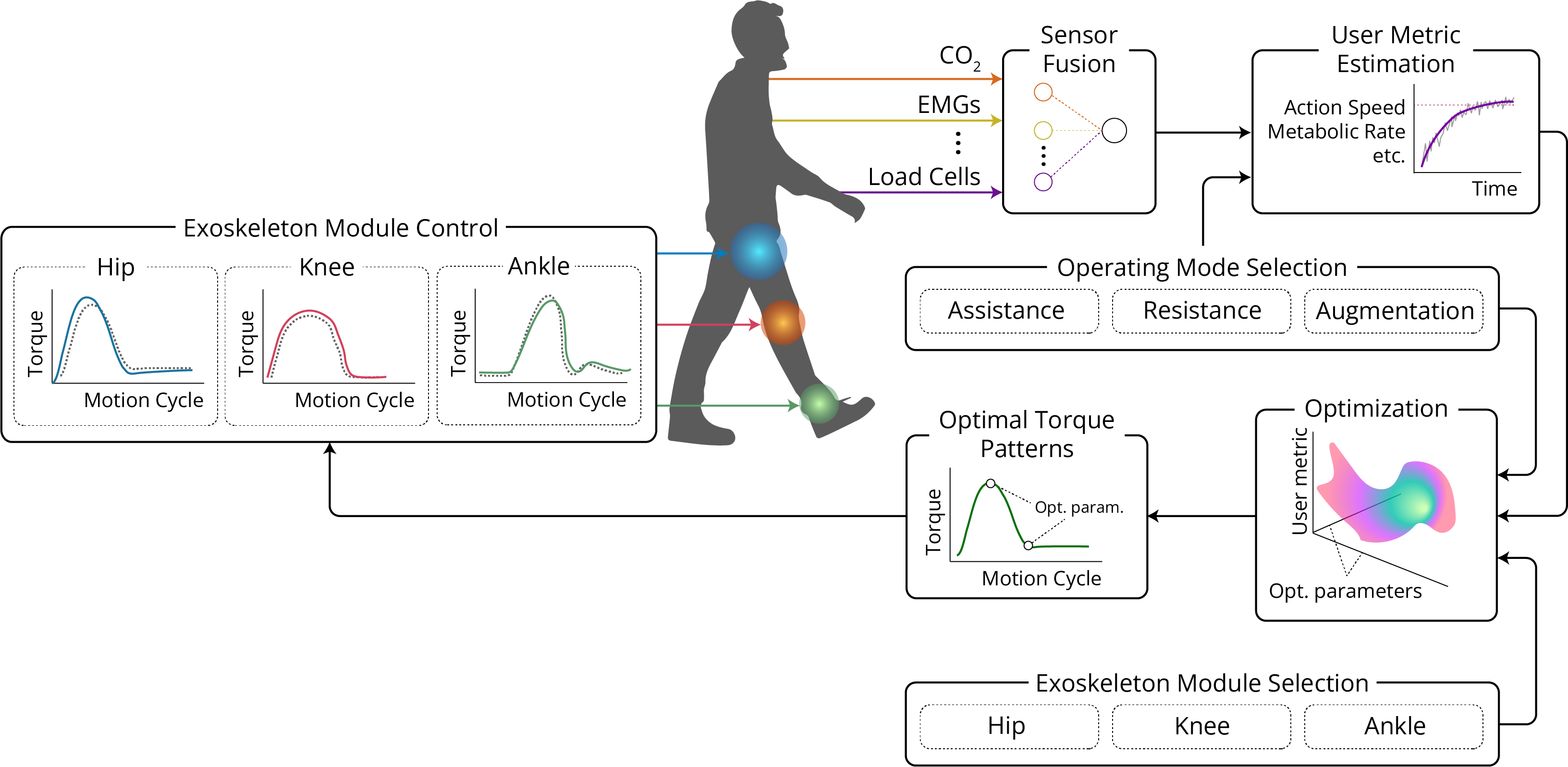
The EXHILO 2 project, conducted in collaboration with the MoveAbility Promobilia Lab, extended our work on real-time human-in-the-loop (HILO) control for exoskeletons. The project explores adaptive tuning of assistance strategies across different users, aiming to improve personalization and reliability.
Our contribution
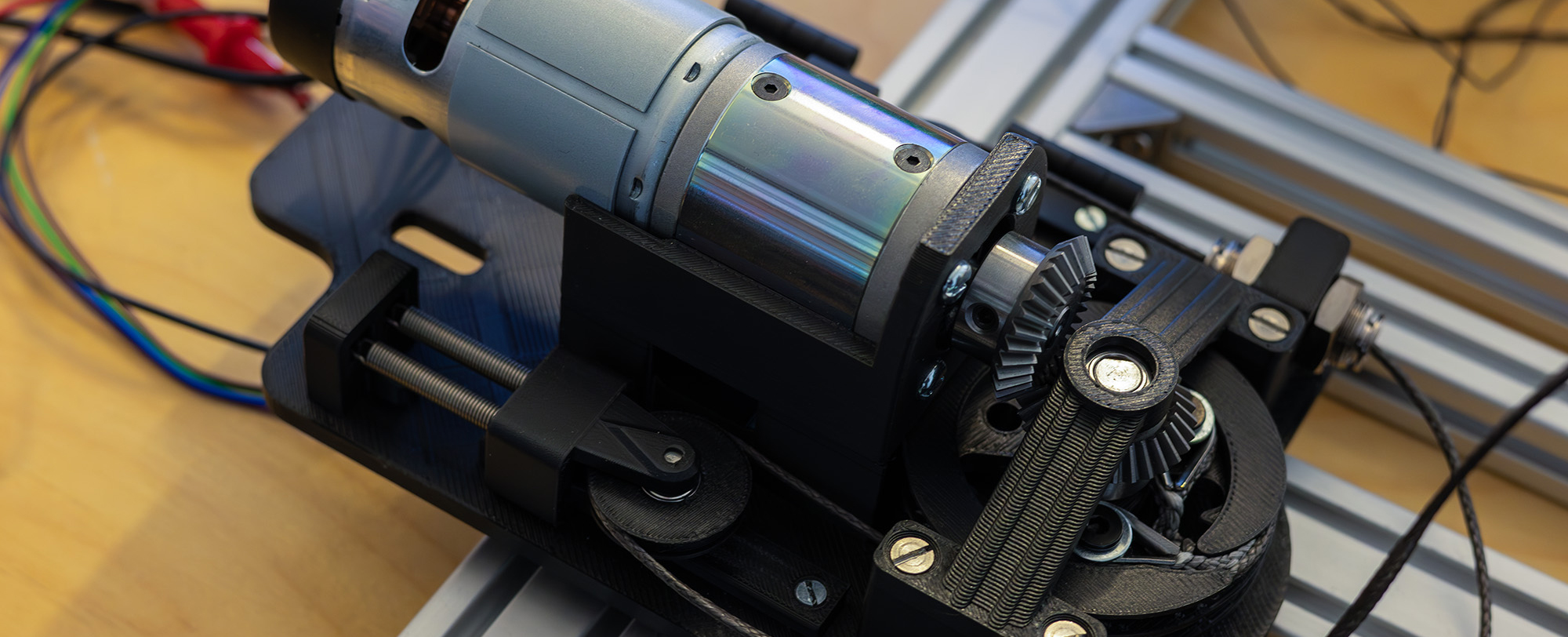
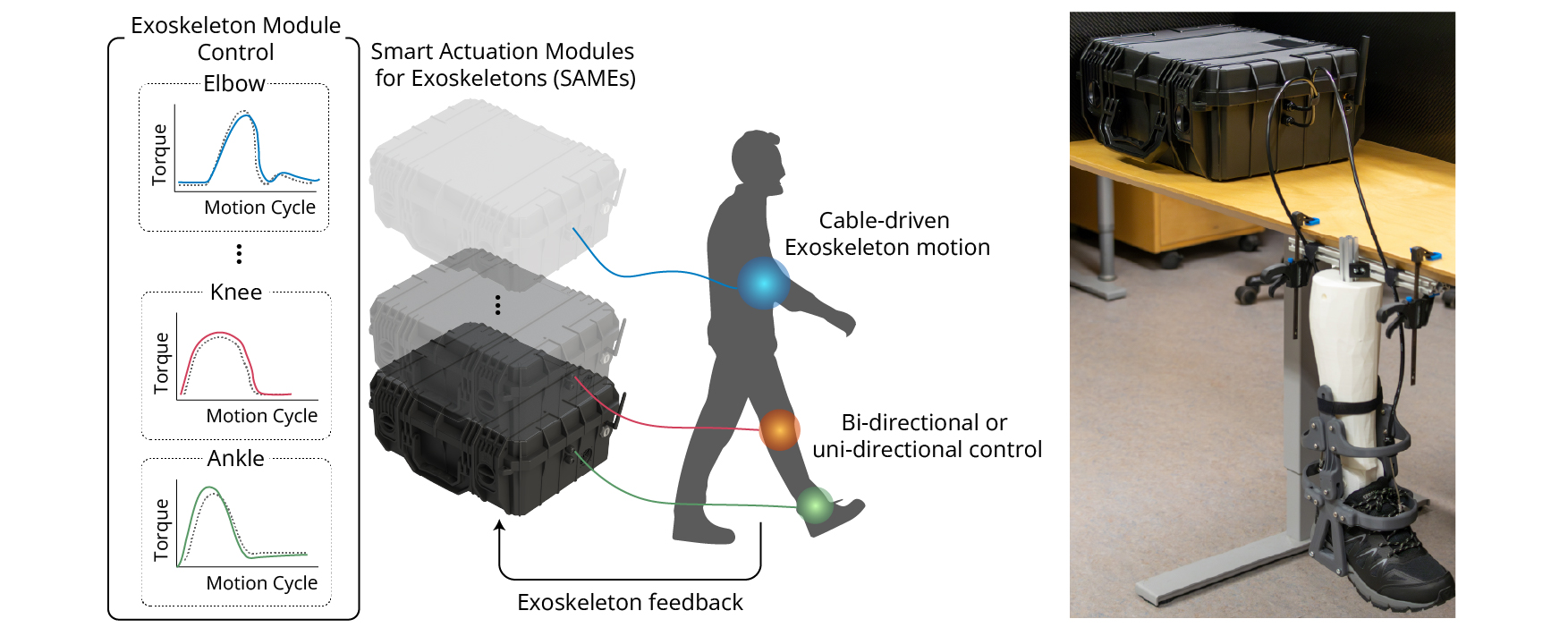
We contribute to this project via the development and validation of off-board actuation modules that enable flexible integration with different exoskeleton configurations. Working closely with the Promobilia MoveAbility Lab, we integrate our modules with their exoskeleton structures and HILO control strategies, thus creating a unified platform that supports systematic evaluation of personalized assistance strategies in walking and related activities.
The EXHILO project, carried out in collaboration with the MoveAbility Promobilia Lab, addressed the challenge of making exoskeletons adaptable to individual users and varying tasks through human-in-the-loop (HILO) optimization. By combining modular hardware, embedded sensing, and experimental trials, the project laid the foundation for advancing personalized and reliable assistive technologies for mobility.
Our contribution
The Robot Design Lab’s contribution focused on developing a modular smart robotic system for evaluating exoskeletons, enabling systematic testing of different control strategies and actuation designs.