
AKI: A Child-Centered Social Robot Platform for Safe Interactions
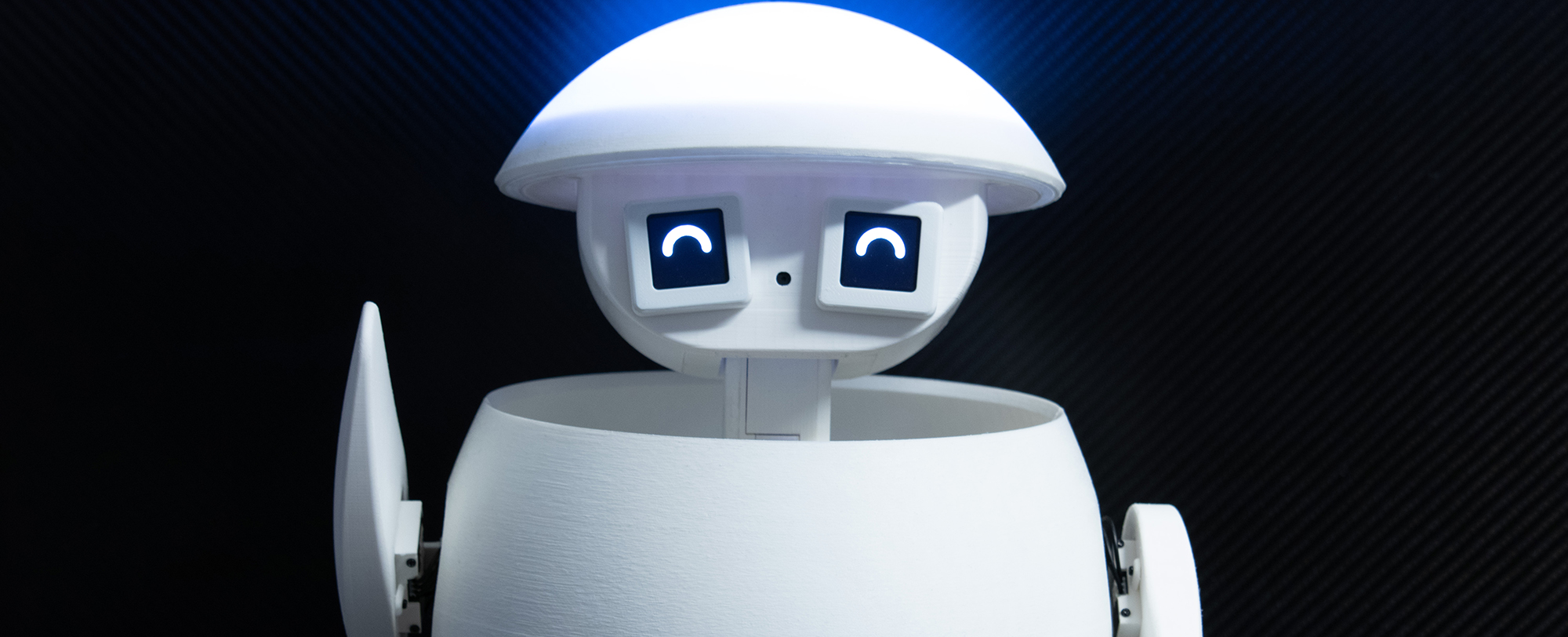
The AKI project was initiated by the Robot Design Lab at KTH in 2022 and has since been carried out by MSc students of the Mechatronic Capstone Course (MF2121) and the Degree Project in Mechatronics (MF214X / MF224X). AKI is a tabletop robot designed as a platform for advancing human–robot interaction with children. Through successive student projects, AKI has undergone iterative design cycles focusing on safety, reliability, and expressive interaction, evolving into a versatile and expandable research platform.
Background
AKI was first developed in 2022 by MSc students of the Mechatronics Unit, as a capstone project provided and supervised by the Robot Design Lab , with reference to UNICEF’s AI policy for children, translating principles of safety, transparency, and accountability into a robotic prototype. The first cycle produced an egg-shaped robot with 11 degrees of freedom, designed to express basic emotions through motion, lights, and displays. This design served as a testbed for exploring trustworthy child–robot interaction.
A second cycle was performed in 2024, in another iteration of the mechatronics capstone course, and targeted improvements in reliability, autonomy, and mobility. The redesign integrated wheels, transforming AKI from a static tabletop device into a mobile system capable of untethered operation in real-world environments such as classrooms and healthcare settings.
The project is ongoing, with MSc thesis projects now investigating new human–robot interaction qualities through the development and integration of soft robotics. These efforts aim to enhance expressive interaction, ensure safety through compliance, and expand the design space for adaptive robotic systems.
Our Contribution
The Robot Design Lab guides and supervises the full mechatronic development process, providing continuity across capstone and MSc thesis projects. Our contributions include supporting the iterative design process from initial concepts and CAD models to prototyping and testing, enhancing reliability and autonomy through redesign and validation of long-term operation, and investigating soft robotics as a means to improve compliance, adaptability, and human–robot interaction qualities.
Through these efforts, AKI continues to serve as a research and educational platform for advancing inclusive and reproducible social robot design
Sustainability Goals
AKI contributes to the UN Sustainable Development Goals by:
-
Good Health & Well-Being (SDG 3): enabling safe and supportive human–robot engagement in sensitive contexts.
-
Quality Education (SDG 4): providing a hands-on platform for student-driven innovation and inclusive learning opportunities.
-
Reduced Inequalities (SDG 10): ensuring accessible robotic design that supports equitable participation in education and society.

Funded by
Robot Design Lab, Supported by Honda Research Institute of Japan
Project duration
2022 – Ongoing