
EXHILO 2: Advancing Real-time Exoskeleton Control for Human-in-the-Loop Optimization
This project advances the modular lower-limb exoskeleton platform initiated in the first demonstrator project EXHILO. In this second phase, the project focuses on duplicating and validating the actuation modules, implementing and testing a broader set of Human-in-the-Loop (HILO) control strategies, and integrating the modules with prototype exoskeleton structures with the goal of validating the overall solution. Together, these developments aim to establish a reliable and adaptable platform for personalized exoskeleton assistance, supporting both laboratory research and clinical evaluation.
Background
Musculoskeletal disorders are a leading cause of long-term disability, and wearable exoskeletons are a promising tool to reduce physical strain and improve mobility. Yet, wider adoption is limited by the challenge of adapting assistance to individual users in real-world conditions.
Human-in-the-Loop optimization (HILO) addresses this challenge by continuously adjusting control parameters based on real-time measures of user performance, such as energy cost, kinematics, or subjective feedback. This method enables assistance to be tailored dynamically, increasing both effectiveness and user acceptance.
EXHILO 2 builds directly on the foundations of EXHILO by strengthening the modular exoskeleton platform, validating duplicated actuation modules, and investigating a broader range of control approaches of the full integrated solution. The project combines biomechanics expertise from the Promobilia MoveAbility Lab with mechatronics expertise from the Robot Design Lab, bridging the two fields to advance both human-centered testing and robotic system development.
Our Contribution
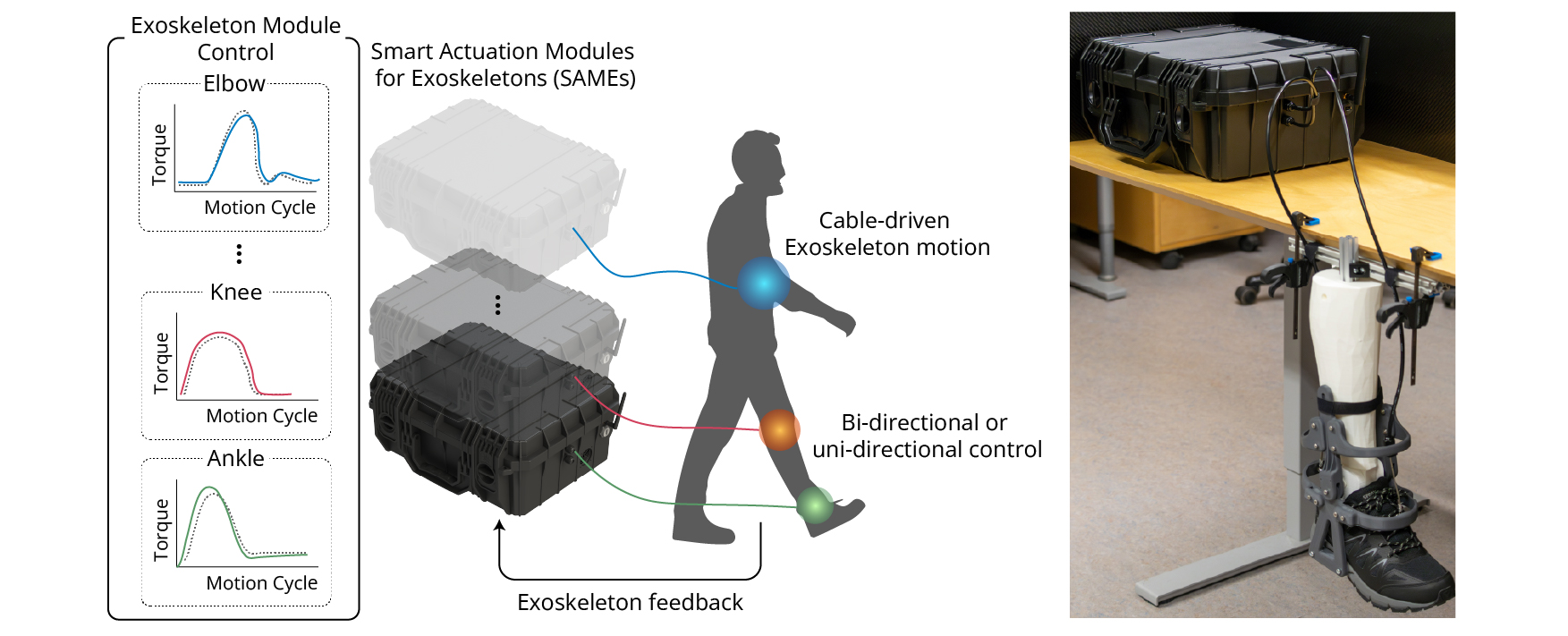
We contribute to this project via the development and validation of the off-board actuation modules that enable flexible integration with different exoskeleton configurations. Working closely with the Promobilia MoveAbility Lab, we integrate our modules with their exoskeleton structures and HILO control strategies, thus creating a unified platform that supports systematic evaluation of personalized assistance strategies in walking and related activities.
Sustainability Goals
With this project we aim to improve health and well-being in all genders, reduce inequalities and participation of marginalized populations (UN sustainable development goals 3, 5, 10).

Funded by
Project Duration
01/01/2024 – 31/12/2025
Contact
