
Jakob Kuttenkeuler

Professor
Detaljer
Forskare
Om mig
I am Professor of Naval Architecture at KTH Royal Institute of Technology and a member of the Maritime Robotics group. My research spans maritime robotics, autonomous marine vehicles, hydrofoiling craft, flight and motion control, marine hydrodynamics, and wind-assisted propulsion.
Over the years I have contributed to research in autonomous underwater vehicles, maritime autonomy, route optimization, aeroelasticity, ship motions, and advanced marine control systems. I am particularly interested in combining aerospace flight mechanics with naval architecture to create highly efficient marine vehicles.
At KTH I teach courses in naval architecture and maritime engineering and have long been engaged in project-based engineering education, where students develop and validate real systems through experimental work.
I have been involved in several large interdisciplinary research initiatives, including the Swedish Maritime Robotics Centre (SMaRC) and the Oceanbird project, where KTH contributes to the development of wind-powered cargo vessels through aerodynamics, performance prediction, control, and model-scale testing.
Evolo:
Professor Kuttenkeuler has been engaged in hydrofoiling technology research for more than fifteen years. His work in the initial Evolo-project contributed to some of the pioneering developments of electrically propelled hydrofoiling craft, helping establish concepts that later evolved into the modern e-foil industry. This research has since expanded to encompass advanced hydrofoil hydrodynamics, flight control, autonomous operation, and high-performance marine vehicles.
At KTH, this research has led to the further development of Evolo, an experimental hydrofoiling unmanned surface vehicle platform that serves as a testbed for control systems, sensor fusion, guidance and navigation, perception, and maritime autonomy. The work combines expertise from aerospace engineering, flight mechanics, and naval architecture to explore the next generation of highly efficient marine vehicles. Here is a clip from REPMUS 2025.
Current activities include research on autonomous hydrofoiling craft, real-time flight control systems, radar-based altitude sensing, collision avoidance, onboard perception, and low-signature maritime platforms. Several of these developments are being evaluated through experimental prototypes and full-scale demonstrators.
The research has also stimulated industrial collaborations and commercialization activities through the spin-off initiative EvoloFoil.com, which seeks to transfer hydrofoiling and autonomous maritime drone technologies from academic research into practical applications.

The wPCC project Oceanbird:
I am very proud to be one of the researchers in the wPCC project Oceanbird aiming to contribute to the disruptive change in sea transportation towards sustainability. The project aim at developing technologies needed to sail large cargo vessels over open oceans and is a collaboration between KTH, Wallenius Marine and SSPA. The KTH part of the project focuses on aerodynamics, performance predictions, weather routing, maneuver simulations and control and model scale tests. The picture below is a 7 meter (1:30 scale) sailing demonstrator.

The Autonomous Underwater Vehicle LoLo:
The general aim for the Maribot LoLo (4 meters long and 400kg heavy) is to be a demonstrator tool and experimental platform for a wide range of research activities. The AUV itself is thus to be regarded as the tool with which capabilities in all four SMaRC technology areas (Autonomy, Perception, Endurance and Communication) can be tested, improved and demonstrated. Since the "truck" is optimized for flexibility rather than for a certain mission-specific operation. Some of the key features are:
- Large enough to carry a wide variety of payload (incl. e.g. water sampling and buoy-deployment,
alternative energy systems etc.).
- Small enough to be trailered by car, handled and operated (incl. ramp-LAR) by 2 persons.
- Robust enough to be handled by students with "standard tools".
- Simple integration of science-sensors (Physical space, power & data).
- Short turnaround times in terms of both back-to back missions and when tailored for certain mission.
- Scalable in terms of e.g. energy storage & payload bay.
- Adaptable, (propeller, glider, speed, light/neutral/heavy, static trim-able).
- Standardized and easy inclusion of new sensors into the "Scientist".
- Maneuverable enough to sniff while "slow enough" to have great range.

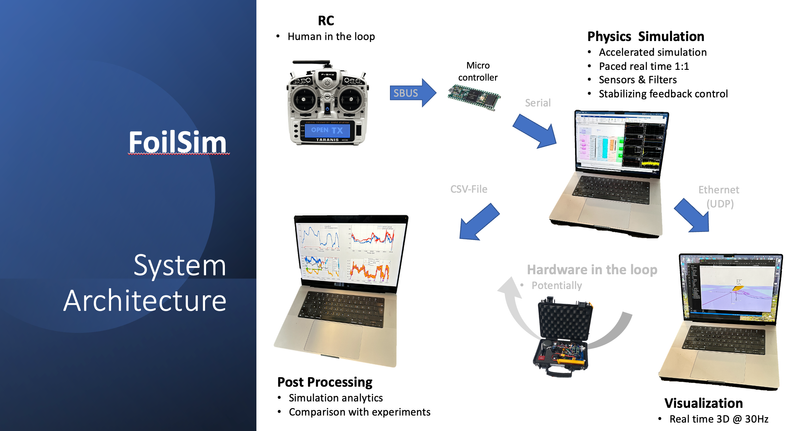
Flight Dynamics Simulation of Hydrofoiling Watercraft
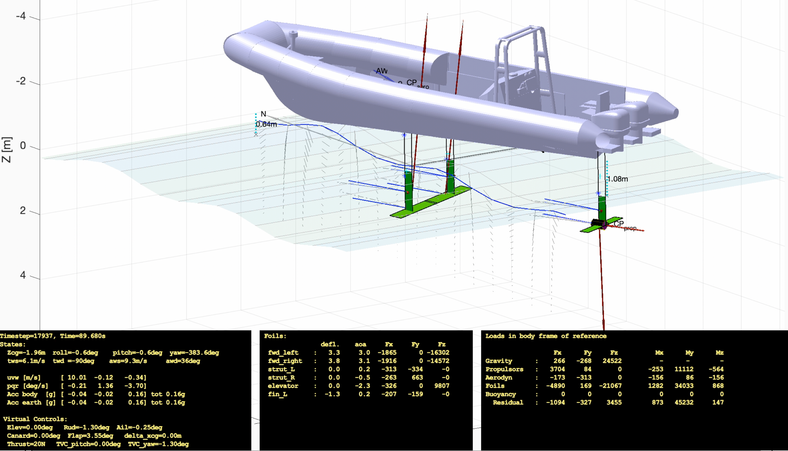
Foilsim is the name of a numerical time-domain flight dynamics simulator for hydrofoiling craft under development by Jakob Kuttenkeuler. The fundamental idea behind the Matlab/Simulink-basedFoilsim was the prospect of realistic studies of equilibrium states as well as characteristics of stability and the full dynamic behavior of any hydrofoiling craft including control systems, sensors and actuators. The simulator is full 6DOF/3D including Coriolis & inertia terms (full inertia tensor) in the equations of motion. The foil-modeling is somewhat application-dependent and enables 2D strip-approach including 3D corrections. The use of virtual controls (such as elevators, ailerons, elevator, flaps and thrust vectored (TVC) propulsion) mapped onto the physically actuated (application-dependent) foil set gives large flexibility of control law development. The modeling of the environment includes 2D wave spectrum and effects of aerodynamics of the craft, i.e. the craft can be maneuvered at all relative wind and wave angles.
Foilsim is intended to be used as a digital twin for any hydrofoiling craft for the purpose of:
- Simulation based configuration design.
- Control system design, verification & optimization.
- General investigations using hydrofoil simulation.
- Maneuver design/analysis (e.g. banked & unbanked turns).
- Weight-shift analysis for performance and stability investigations.
- Ride quality evaluations (seakeeping with and/or without waves/wind)
- Loads prediction.
- Failure analysis (e.g., by simulating component failure).
- Wind sensitivity.
And here is a clip showing the result of a project where a student group coupled a motion rig to the physics simulator with force feedback and all :-)
Kurser
Design av mindre fartyg (SD2711), examinator, lärare, kursansvarig
Examensarbete inom Marina system, avancerad nivå (SD271X), kursansvarig, examinator
Examensarbete inom flygteknik, avancerad nivå (SD281X), examinator
Farkostteknik (SD1002), lärare
Lättviktsdesign (SD2432), examinator
Marindesign (SD2702), examinator, lärare, kursansvarig
Mindre fördjupningsprojekt inom marin teknik (SD2724), lärare, kursansvarig, examinator
Segling för prestanda (SD2706), lärare, kursansvarig, examinator