Robotik, perception och lärande (RPL) innefattar forskning inom datorseende, robotik och maskininlärning. I framtiden kommer robotsystem som erbjuder avancerad service inom industri, sök- och räddningstjänst, i medicinska tillämpningar eller som assistenter till äldre bli en integrerad del av samhället, vilket gör att forskning inom detta område är viktigt och bidrar med avgörande kunskap.
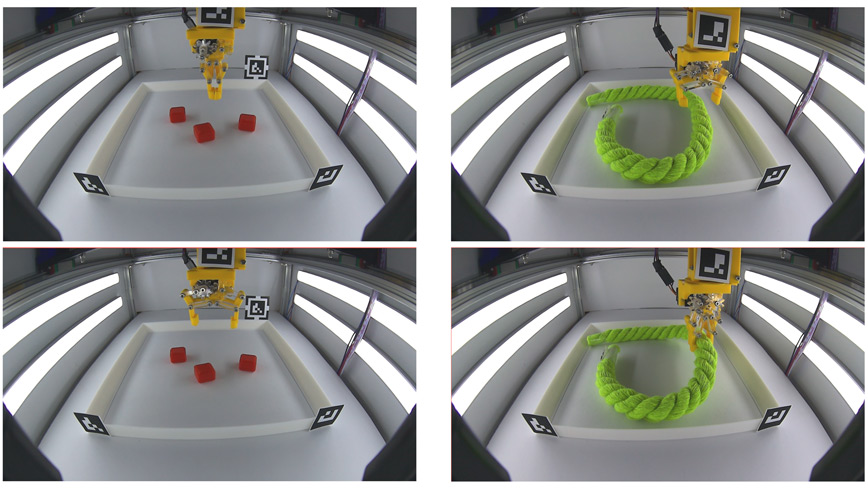
Vyer av CloudGripper-robotarna med öppen källkod som utvecklats av gruppen. Projektet med öppen källkod är planerat att lanseras offentligt på IEEE IROS i Detroit och online på cloudgripper.org senare i år.
KTH-forskare utvecklar nya metoder för robotik