
EXHILO Project Receives Digital Futures Support for Real-Time Exoskeleton Control
Empowering individualized wearable robotics through real-time human-in-the-loop optimization
Our project EXHILO (“Real-time exoskeleton control for human-in-the-loop optimization”), a collaboration with the Promobilia Moveability Lab at KTH has been selected for support by Digital Futures . This funding supports the project from 2022 through 2024, enabling an interdisciplinary effort in advanced wearable robotics.
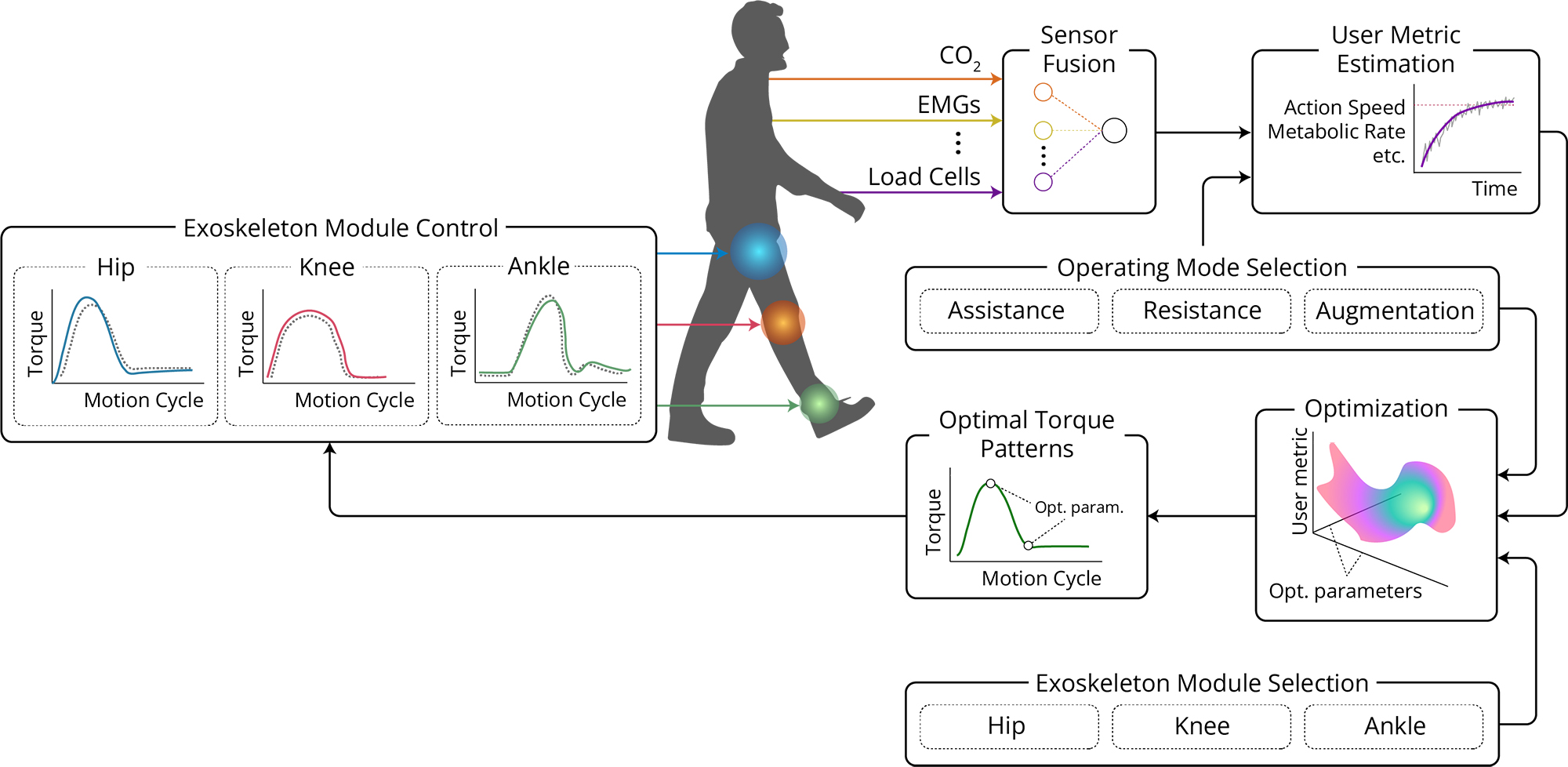
EXHILO will develop a modular lower-limb exoskeleton featuring off-board actuation and a flexible digital interface. Through Human-in-the-Loop (HILO) optimization, the system will adapt assistance strategies in real time, tailoring torque assistance to individual users' biomechanics, thereby enhancing comfort and practicality.
The interdisciplinary collaboration brings together biomechanics (Promobilia Moveability Lab) and mechatronics (Robot Design Lab). Together, the team will co-design and test a user-centered control architecture that links physical hardware with adaptive digital optimization algorithms.
Our lab's contributions focus on a modular actuation system for exoskeleton verification and validation, as well as synthesis of real-time control implementation, including CMA-ES-based HILO algorithms.