
Smart Actuation Module Presentation at SSB 2024
We presented our recent developments in exoskeleton verification and validation at the Swedish Society of Biomechanics conference in Lund

On May 27–28, the Robot Design Lab at KTH took part in the SSB 2024 Conference, organized by the Swedish Society of Biomechanics in Lund, Sweden. The team presented a poster highlighting the lab’s latest developments on the Smart Actuation Module for Exoskeleton Verification and Validation (SAME).
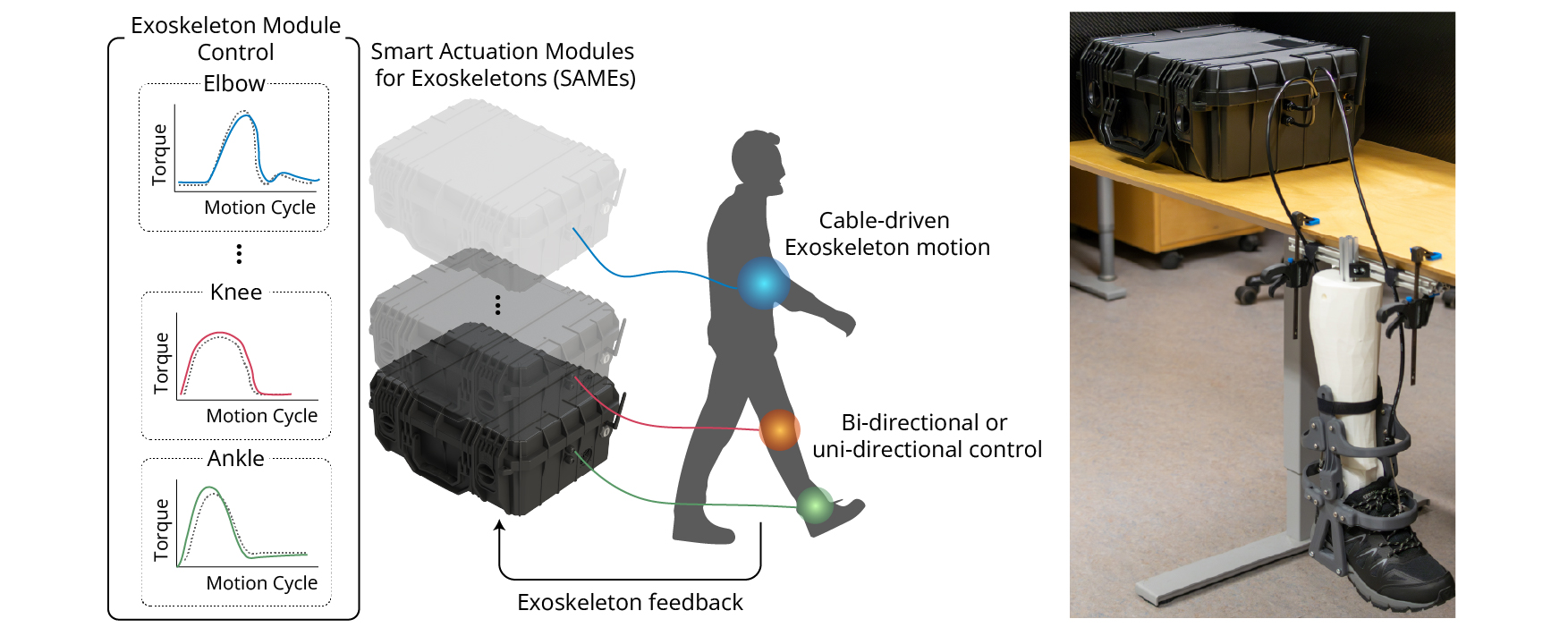
First initiated within EXHILO and now further developed under EXHILO 2 in collaboration with the Promobilia Moveability Lab at KTH, our lab's contribution to the project was to create an off-board actuation module that supports the rapid verification and validation of exoskeleton designs in clinical environments. By enabling controlled and flexible testing outside traditional laboratory conditions, SAME opens up new opportunities for demonstrating and evaluating exoskeleton technologies in real-world scenarios.
The conference provided a very valuable forum to exchange ideas with experts in biomechanics, initiating discussions on how smart tools such as SAME can accelerate the translation of exoskeleton research into practical clinical applications.