
EXHILO 2 Receives Digital Futures Funding
Modular actuation and Human-in-the-loop control strategies for advancing exoskeleton use from lab to real-world applications
We are pleased to announce that EXHILO 2 : Advancing Real-time Exoskeleton Control for Human-in-the-Loop Optimization has been awarded Digital Futures funding, with the project duration from 1 January 2024 through 31 December 2025.
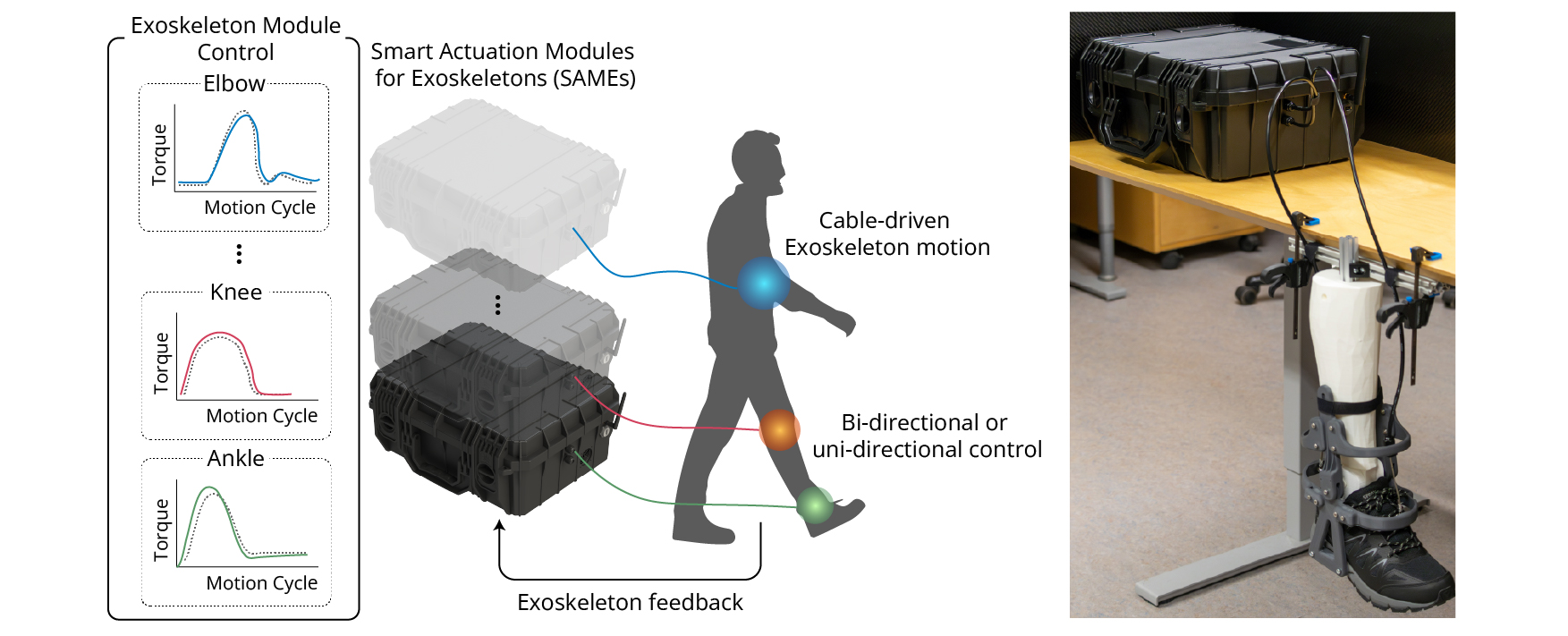
Building on the objectives of the first demonstrator project EXHILO , EXHILO 2 will replicate and refine modular off-board actuation, build exoskeleton prototypes, and integrate these technologies into full exoskeleton solutions for expanding the validation of different Human-in-the-Loop control strategies. The goal is to move from component-level innovation to comprehensive, end-to-end systems capable of real-world validation.
The project continues our cross-disciplinary approach through collaboration with the Promobilia MoveAbility Lab, fostering seamless integration of biomechanics, mechatronics, and optimization protocols. Together, we plan to create a unified platform for systematic evaluation of personalized assistance during dynamic activities such as walking.