6 DOF Haptic devices
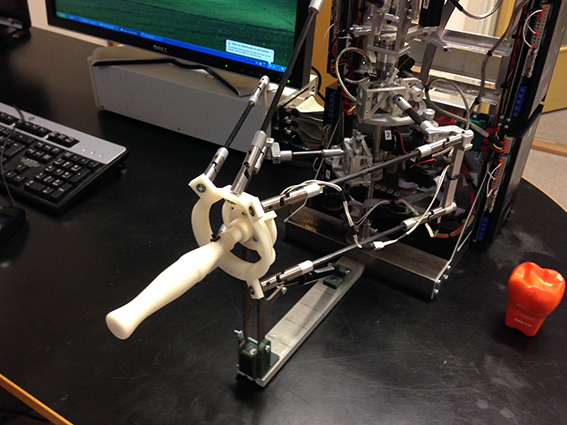
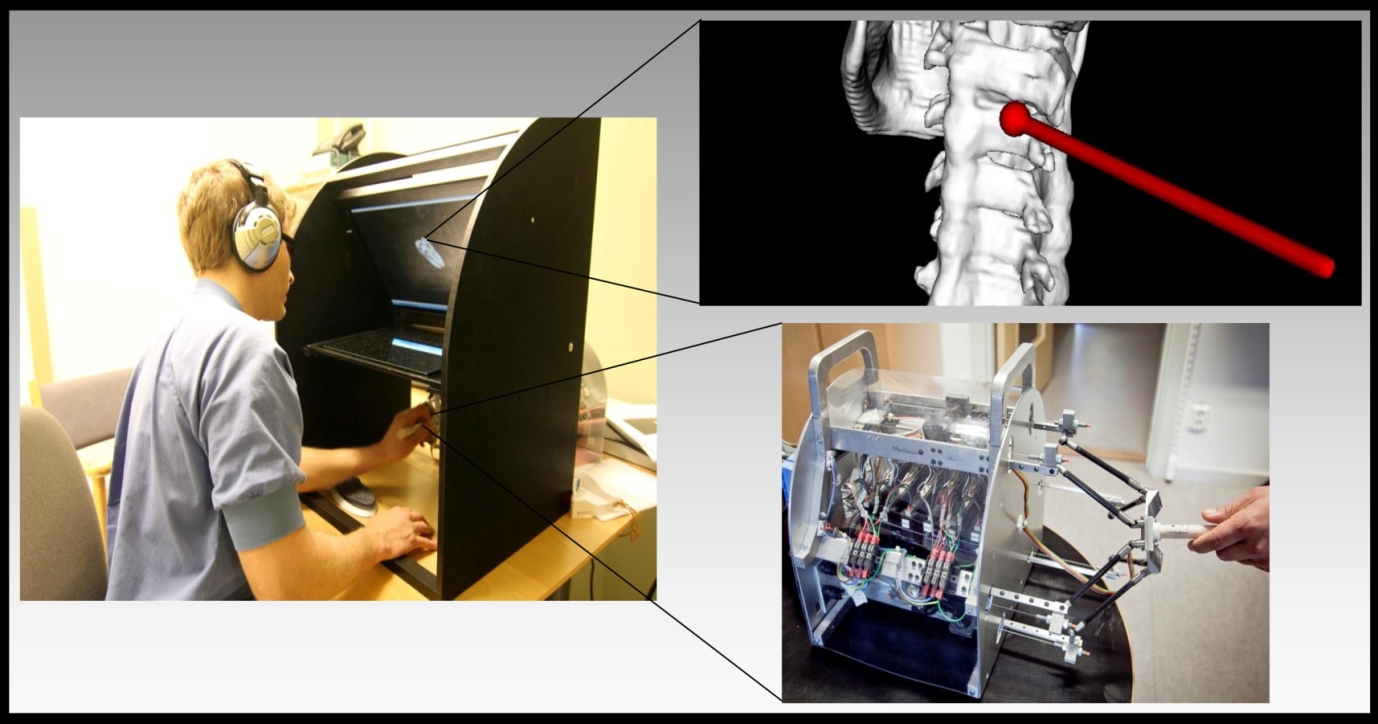
The main focus of this research project is to develop a new 6-DoF haptic device based on parallel structure that can be used in a surgical training simulator for temporal bone milling or as a 6-Dof input- output teleoperated haptic master device.
In this project a haptic device is used to achieve manipulation capabilities and force/torque feedback in six degrees of freedom (6-DoF) during simulation of surgical procedures in hard tissue such as bone structures and dental milling. The application environment leads to three important design problems stiffness, transparency and feedback force/torque in 6-DoF on the device design [2]. In the initial phase three different parallel mechanisms has been studied and analyzed.
In the second phase an optimal model of the “one of the best selected structure” has been developed based on kinematics. In the first optimization stage performance indices e.g workspace, isotropy and force requirements were considered. Prototype of the optimized model has been developed, based on optimal design model. Dc motor with cable transmission were selected to make the device backdriveable and transparent. currently work in progress on optimal control design for this device. Finally the device will be tested in the real application environment “medical simulator” to assure the requirements. Different Haptic control structure will be implemented and testes such as
1) Admittance control
2) Impedance control
3) Robust and adpative control
for forther detail please read the publicatios
Publication
[1] Khan S, Andersson K, and Wikander J. “A Design Approach for a New 6-DoF Haptic Device Based on Parallel Kinematics”, presented at IEEE International Conference on Mechatronics, ICM 2009 Spain.
[2] Andersson, K., Khan, S. “Investigation of parallel kinematic mechanism structures for haptic devices”, presented at 2nd Nordic Conference on Product Lifecycle Management – NordPLM’09, Gothenburg January 2009.
[3] Khan S, Andersson K, and Wikander J. “Optimal design of a 6-DoF Haptic Device”, Accepted at IEEE International Conference on Mechatronic, ICM 2011 Turkey.
[4] Aftab A., Khan, S and Andersson, K. “Kinematic and Dynamic Analysis of a New 6-DoF Tau haptic device”, Accepted at Accepted at IEEE International Conference on Mechatronic, ICM 2011 Turkey.
[5] Khan Suleman, Wikander J. and Eriksson B. “Control Architecture and stability issues of haptic Devices”, Technical Report Jan2010.
[6] Khan S, Andersson K, and Wikander J. “Dynamic Based Control Strategy for Haptic Devices”, Accepted at IEEE WorldHaptics International Conference, 2011 Turkey.
[7] Khan S and Andersson K, “A Design methodology for haptic devices”, Accepted in InternationalConference on Engineering Design (ICED) 2011 Kobenhavm Denmark.
[8] Khan S, Afatab A and Andersson K “Design Optimization of the Tau Haptic Device”, Presented at 3rd International congress on Ultra Modern telecommunication and Control systems( ICUMT 2011) Budapest Hungry, 2011.
The second concept that has been studied are based on the Tau mechanism. This is a fairly new family of unsymmetrical parallel kinematic structures called TAU shown in figure below.