Auto2: Automation for autonomous terrain mobility
This Vinnova-funded autonomous terrain machinery project involves 15 partners, working towards a profitable and low-impact Swedish forestry for the future. The project will address key conditions for self-driving machinery, with the aim of starting a new wave of development that leads to improvements in the working environment of today's forest machine operators and ecological considerations for sustainable forestry.
Funded by: Vinnova
Time frame: November 2018 - December 2020
KTH Mechatronics together with Skogforsk, Komatsu, SLU, LTU, UMIT, Unibap AB, eXtractor AB, BAE Hägglunds, Skogstekniska klustret, Sveaskog, SCA, Holmen, Strora Enso, BillerudKorsnäs and Södra have received a grant from Vinnova to develop autonomous all-terrain vehicles.
Over the last 2 decades, improvements within the Swedish forestry industry have stagnated somewhat when compared to the progress made in the 80s and 90s. True, we now have larger machines offering greater operator comfort, less ground damage and higher capacity, but overall productivity and fuel consumption have not been significantly improved. Meanwhile, demands on the machine operators have increased. The ability and skills of these operators are key for sustainability in terms of profitability and compliance to environmental and cultural regulations and considerations.
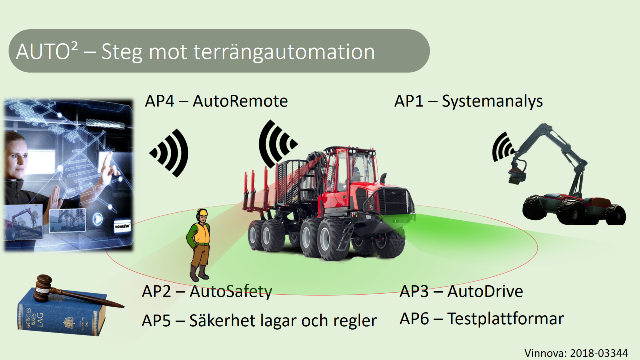
Today, the industry has problems recruiting new operators. This project aims to ensure a profitable and low-impact Swedish forestry for the future by developing three key products which will use state-of-the-art technology in AI and self-driving vehicles, and adapt it for off-road machines. The products will satisfy the three basic needs for enabling autonomous forestry machines (namely: establishment of a safe zone around the vehicle; detection of obstacles in the path of the machine; and remote control) and also generate tools that will be of use to existing machinery.
The goal of the project is to start a new wave of development that will shift the working environment of the machine operators towards a more office-like set up. This in turn is expected to entail increased productivity, less ground damage, an improved working environment and offering the machine operator profession to a wider proportion of the population. This development is expected to decrease energy use and CO2 emissions. The products will strengthen the global competitiveness of the Swedish manufacturing industry for off-road machines. In parallel, we should see improvements nationally – maybe even globally – in both the forestry work environment and ecological considerations for sustainable forestry..
Skogforsk is the project leader for Auto2. Björn Möller at KTH Mechatronics will lead the work package "AutoDrive" (not to be confused with the project of the same name, AutoDrive, June 2017-2020 ). The main task for KTH Mechatronics will be to develop and implement a sensor module to facilitate semi-autonomous terrain capability. This will be demonstrated on a scaled-down forest machine and ultimately scaled up to a full size machine. The duration of the Auto2 project is 2 years (November 2018-December 2020).